
この連載は江渡浩一郎、きゅんくん、青木俊介が週替わりでそれぞれの領域について語っていく。今回はきゅんくんが「黒メカフ(仮)」制作のために、「MTCALF stage」を応力解析した。
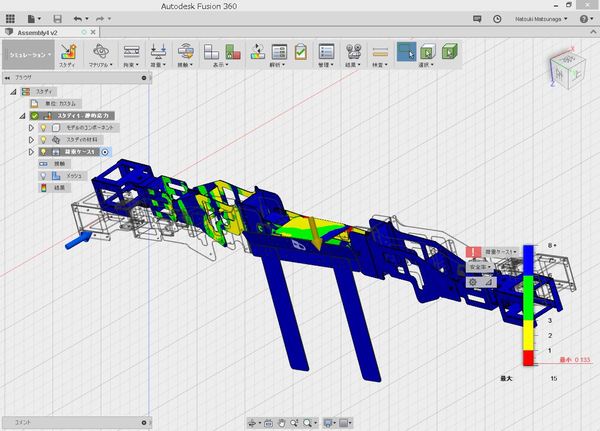
今回は、CADソフト「Fusion 360(フュージョン360)」を使用して、ウェアラブルアームロボット「MTCALF stage(メカフステージ)」の応力解析をする。
Fusion 360はAutodeskが提供する3DCADソフトだ。学生や個人、年間10万ドル以下のビジネス用途ならば無償で使える。3DCADというのはコンピューターでの設計を支援するツールである。
レンダリングやシミュレーション、CAMなどが統合されており、低価格ながら多機能で、ホビイストやスタートアップメンバーなどの間でユーザーが増加している。
メカフステージは、小型のウェアラブルアームロボット「METCALF clione(メカフクリオネ)」を改良しつつ大きくしたものだ。時間のなさもあり、構造については不安が残る個体となってしまった。メカフステージを応力解析することで改良点や問題点などを見つけて次作に生かしたいと思う。
メカフステージの設計には「Inventor(インベンター)」という3DCADソフトを使用した。

上の画像が、Inventor上の画面だ。これをfusion 360にアップロードして解析にかけると下記画像のようになる。
本記事はアフィリエイトプログラムによる収益を得ている場合があります
この連載の記事
- 第346回 「そこそこ稼ぐおじさん」でいいのか? 迷ったあなたへ
- 第345回 順調なのに不安 その違和感、実は“次のサイン”です
- 第343回 メディアアート再燃?「TOKYO PROTOTYPE」に人が殺到した理由
- 第342回 休職中の同僚を「ずるい」と思ってしまうあなたへ
- 第341回 3Dモデルを必死にリギングした結果、「AIが優秀すぎる」ことに気づいた
- 第340回 VRChatでロボットになりたい筆者、最終的にBlenderを選んだ理由
- 第339回 復職が不安なあなたへ。“戻らない復職”を私が選んだ理由
- 第338回 DJをやってみようと思い立った
- 第337回 「子どもを預けて働く罪悪感が消えない」働く母親の悩みに答えます
- 第336回 ChatGPT、Gemini、Claude──特徴が異なるAI、どう使い分ける?
- この連載の一覧へ
























