自動運転カーの車載コンピューターの中でNVIDIAの次世代GPUが動きまくっている
NVIDIAカンファレンス レポート:CES2016
「今日はセルフドライビングカーについて話しましょう」
NVIDIAのジェンセン・フアン(Jen-Hsun Huang)CEOは開口一番こう切り出した。昨年のCES2015の基調講演もほぼすべてが自動車関連だったが、今年も同様に自動車関連。その裏のテーマは、自動運転カーの環境認識を急速に進化させているディープラーニング(深層学習)についてだ。
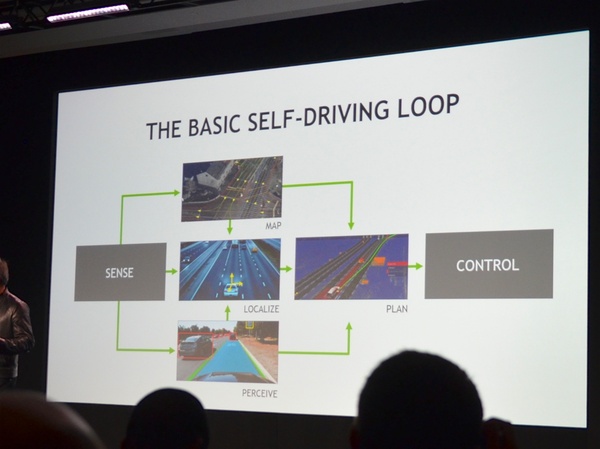
自動運転の基本的な処理ループ。図示するとシンプルではあるが……
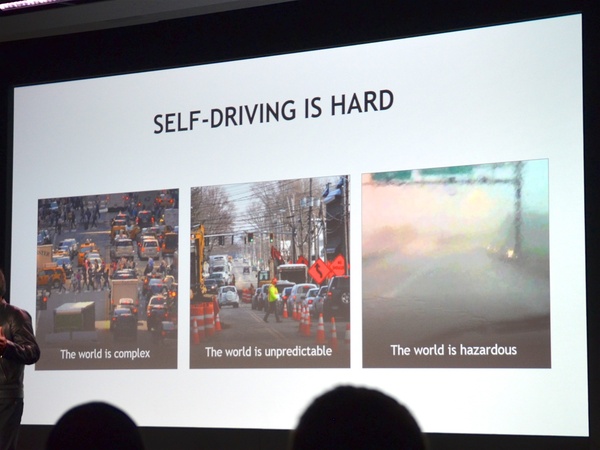
「SELF-DRIVING IS HARD」その実現には困難が山のようにある。
カンファレンスで発表された”製品”は、同社の車載人工知能エンジンの最新版、「DRIVE PX 2」。NVIDIAは「MacBook Pro 150台分のディープラーニング性能」「世界一パワフルな人工知能エンジン」と表現している。
内部には次世代のTegraを2基搭載するほか、背面にはPascalアーキテクチャ採用の次世代GPUを2基搭載。液冷クーラーを組み合わせて「ランチボックスサイズ、250W」というコンパクトなセットに仕上げている。DRIVE PX 2開発プラットフォームの一般販売は2016年第4四半期、つまりほぼ1年後だ。
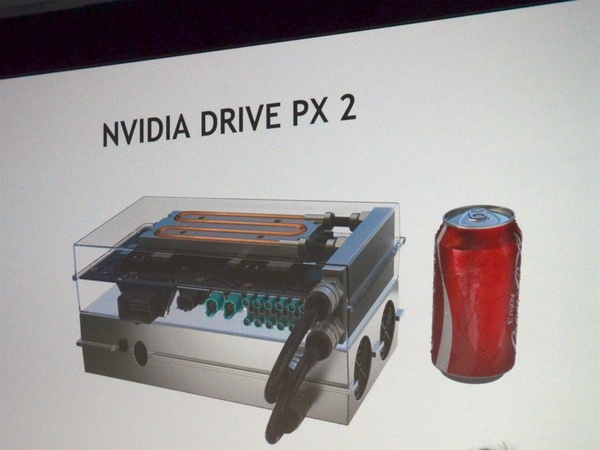
DRIVE PX 2のボックス。高さは350ml缶程度。消費電力は250w。
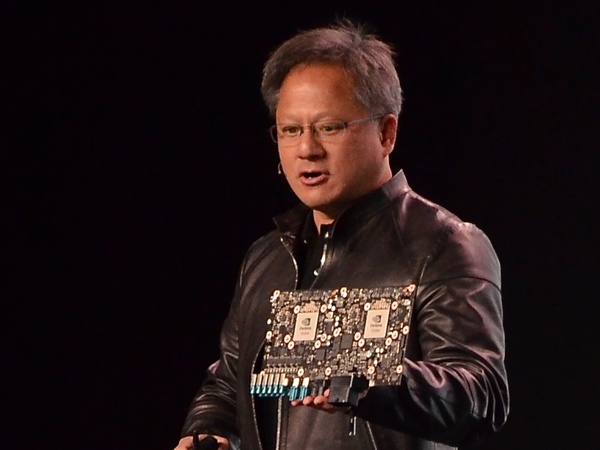
DRIVE PX 2の開発ボードを壇上で披露する持つジェンセン・フアンCEO。表側にはPascalアーキテクチャの次世代Tegraプロセッサーが配置してある。
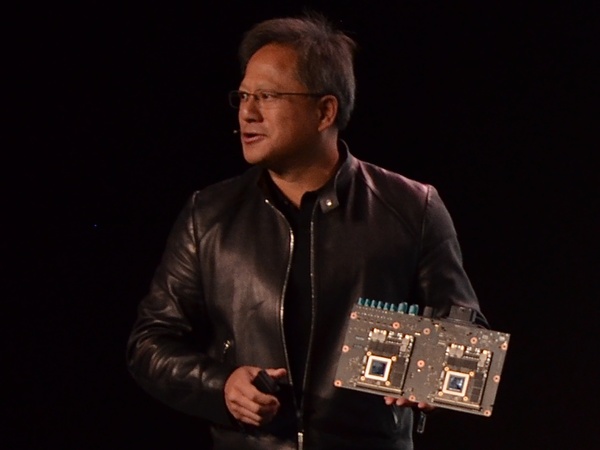
背面はおなじくPascal世代の次世代GPU。
カンファレンスの全体を割いて語ったのは、NVIDIAの自動車向けのディープラーニングへの取り組みのサマリーと、プラットフォームの整備についてだった。専門性の高い解説も多く理解が容易ではない内容もあるものの、「今ここまで来ている」という成果は一見に値する。
自動運転カーにおいて困難なチャレンジは、「各種センサーが吐き出すリアルタイムの情報と、おびただしい量の演算」(ジェンセン・フアンCEO)を実行しなければならないことだ。
その一端がわかるのが、カンファレンスのアーカイブ動画(記事末尾)の45分前後からの「DriveWorks」のスニークピーク(チラ見せ)だ。DriveWorksは、「OSであり、アルゴリズムであり、独自のミドルウェアであり、ストリーミングパイプラインでもある」というNVIDIAのリアルタイムグラフィックスの技術の結晶といえるソフトウェアで、Drive PX 2とセットで使う。
壇上では、6台の標準的な自動車グレードの車載カメラと4基のLIDAR(レーザー検出測距センサー)と、一般的なGPSを搭載したデモカーで環境認識をするプロセスを見せた。つまり、自動運転カーに搭載されるコンピューターの中で何が起こってるか? がわかるデモということになる。
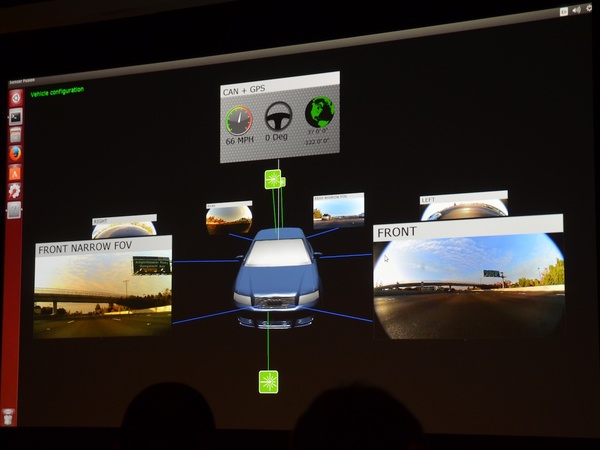
デモ車両のカメラ/センサー構成。すでにクルマに採用されているもので特殊ではない水準だが、これだけカメラやセンサーがあると処理する情報量は膨大だ。
リアルタイムに処理する情報量は、6台のカメラが各100万画素あり、それを1秒間に30フレームで取り込んで処理している。加えて、LIDARのデータは4基合わせて1秒間に160万サンプルに相当するそうだ。
デモではLIDARセンサー1台ずつが認識している空間をそれぞれ見せ、次にそこに魚眼レンズなどのカメラ映像の画像認識やGPSの位置情報など段階を追ってを重ね合わせていく。すると、(かなり端折った説明をすると)車の周囲の環境(奥行きも含めた3D空間)と車両や人物や標識といった対象物を認識する様子が姿を現してくるという仕掛けだ。
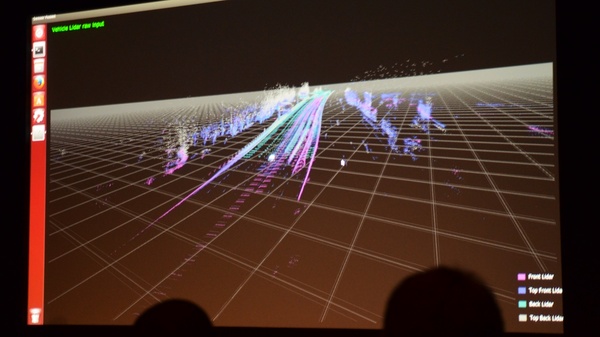
LIDARセンサーの情報だけを表示。周囲の環境をレーザーで測距すると、空間らしきものが現われる。
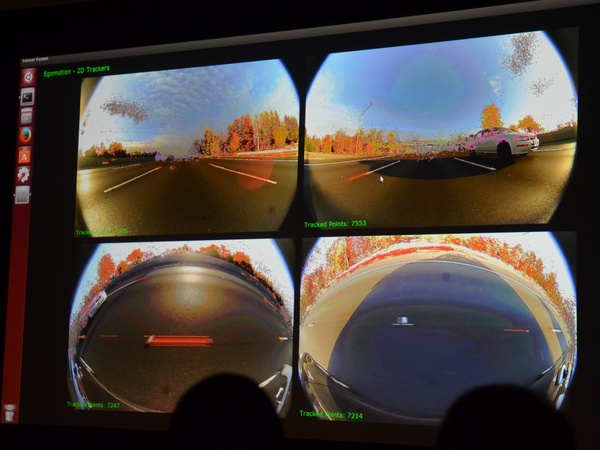
カメラによる2D画像認識。

ディープラーニングで鍛えた車両認識。SUVトラックか、セダンかなどを見分けている。
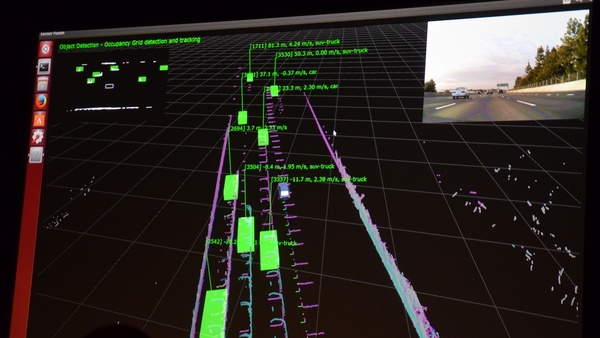
そして環境認識に車両の認識処理が加わるとこうなる。車両のサイズや移動速度も推定して表示している。
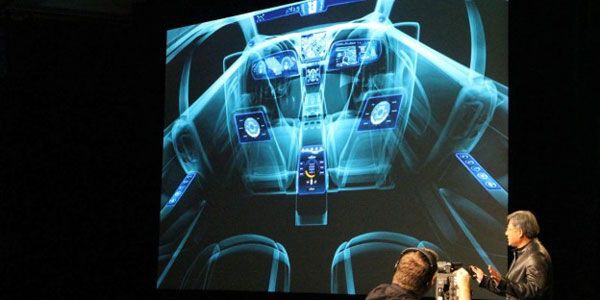
我々が自動運転カーのデモ映像で目にする「車の周囲を認識している分かりやすいナビゲーション表示(インフォテイメントシステム)」の裏側には、こうしたリアルタイムの空間認識データが存在しているということになる。

自動運転カーにありそうなインフォテイメントを再現したもの。CGではなくてデータはリアルなものから演算しているらしい。窓ガラスから見えるクルマと、ナビゲーション画面の対象物が同期している点がポイント。
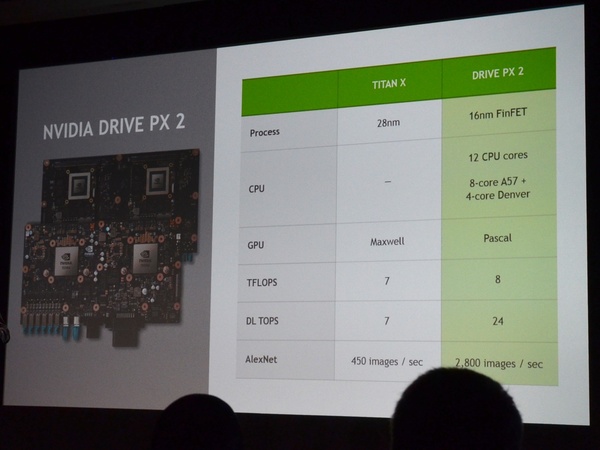
「DRIVE PX 2」と、Maxwell世代の最高峰GPU「TITAN X」の性能比較。
最新の技術では、この精度の環境認識がリアルタイム処理でできるような時代が来てるということに驚く人は多いんじゃないだろうか。
●関連リンク
NVIDIA Accelerates Race to Autonomous Driving at CES(英語)
本記事はアフィリエイトプログラムによる収益を得ている場合があります