

「2XL430-W250」
ROBOTIS Japanさんに、Dynamixelの「2XL430-W250」という新しいサーボをいただいた。普通のサーボはサーボ1個で1軸なのだが、このサーボは1個で2軸ある面白いサーボだ。
まず、単純にROSでこのサーボを動かしてみて、その後ジョイパッド(ゲームコントローラー)でサーボをコントロールするところまでやってみた。その軌跡をここに記載する。『実用ロボット開発のためのROSプログラミング』(森北出版)を参考に進めた。
ROSを使って、1個に2軸ある面白いサーボ、Dynamixelの2XL430-W250をゲームコントローラーで動かしてみました。 pic.twitter.com/Ba4XD0AbuH
— きゅんくん (@kyun_kun) September 25, 2019
モバイルノートPC「ThinkPad X220」を使用した
前回までの記事はラズパイを使っていたがラズパイではスペックやらが足りず、作業が遅くなることに気づいた。今回からモバイルノートPC「ThinkPad X220(以下、PC)」を使うことにした。OSは変わらず「Ubuntu 16.04」だ。
「ThinkPad X220」
サーボとヒンジを組み立て、ケーブルを接続する。このeマニュアルを参考に、ケーブルを接続した。

右の軸からケーブルが伸びている。
さらに、ヒンジをネジで固定した。

ヒンジの角度が間違っていたようで、後ほど修正している。
以前の記事で組み立てたU2D2を使用してサーボをPCに接続する。
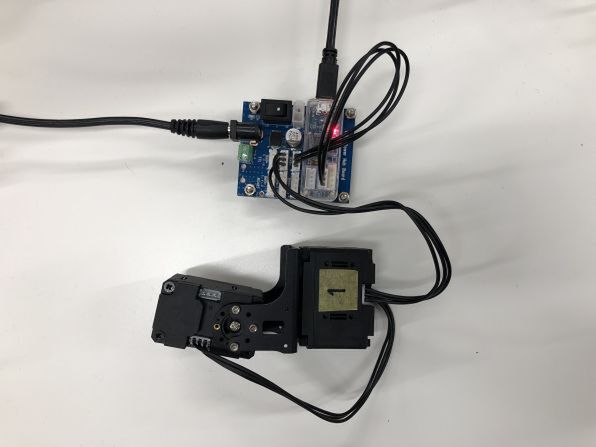
写真のサーボは「XL430」だが、接続方法はこれと変わらない。サーボをラズパイに繋げた様子。左のコードはACアダプターに、上のコードはPCに繋げる。
本記事はアフィリエイトプログラムによる収益を得ている場合があります
この連載の記事
- 第349回 生成AIなんでも展示会、想像以上に“なんでも”だった ホラーもぬいもロボも登場
- 第348回 動画の字幕つけ、こんなに楽になってたのか Adobe Premiere Proの自動文字起こしに今さら驚いた
- 第347回 AIで作った曲でDJした結果… 意外な壁があった
- 第346回 「そこそこ稼ぐおじさん」でいいのか? 迷ったあなたへ
- 第345回 順調なのに不安 その違和感、実は“次のサイン”です
- 第343回 メディアアート再燃?「TOKYO PROTOTYPE」に人が殺到した理由
- 第342回 休職中の同僚を「ずるい」と思ってしまうあなたへ
- 第341回 3Dモデルを必死にリギングした結果、「AIが優秀すぎる」ことに気づいた
- 第340回 VRChatでロボットになりたい筆者、最終的にBlenderを選んだ理由
- 第339回 復職が不安なあなたへ。“戻らない復職”を私が選んだ理由
- この連載の一覧へ
























