
前回の記事では、ROBOTISさんからいただいた2XLという1個に2軸入っている面白いサーボをROSで動かすことができた。
今回は、2軸の2XLと1軸のXL2個を繋げて4つの軸をジョイパッドで動かしたあと、アームロボットをインタラクティブに動かす(手などが近づいてきたら逃げるアームを作りたい)ために、「Intel RealSense Depth C amera D435i」というデプスカメラをROSで動かし、物が近づいてくるのを認識させたいと思う。

今回完成したプロトタイプ。
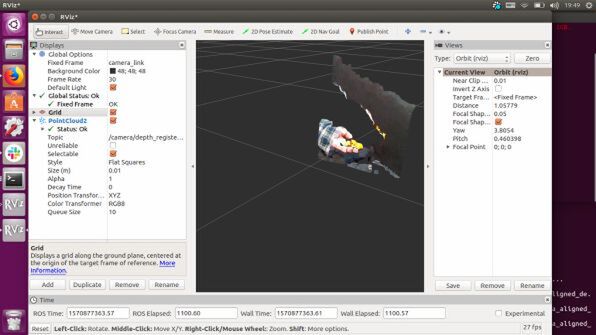
Intel RealSense Depth Camera D435iで撮影したソファーとトミカを持った手。ソファーと手の間に距離があるのがわかる。
デプスカメラとは、奥行きの情報を取得する深度センサーがついたカメラのことで、物同士の距離などがわかる。デプスカメラについて、今回はROSを使って撮影するところまでで、インタラクティブにするところまでは至っていない。次回インタラクティブを進めていきたい。
サーボを3つ、4軸動かせるようにした
まずは、サーボを3つ、4軸動かせるように「basic.yaml」を書き換え、「joy_pan_tilt_4.py」という4つのサーボを動かすコードを用意したいと思う。
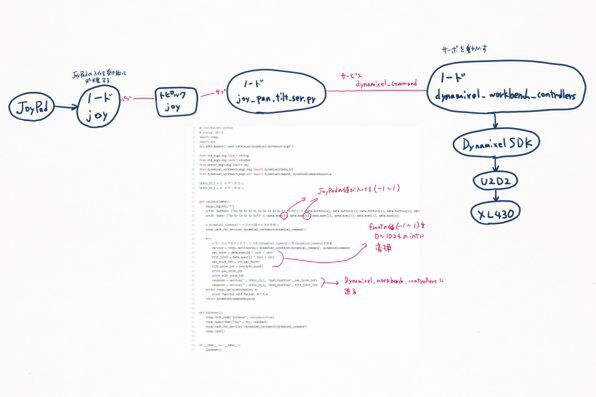
前回XLを動かしたときのシステム図。
1軸のサーボXL(2個)と2軸のサーボ2XL(1個)を、デイジーチェーンで繋げる。

XLを2個繋げたときのように2XLとXLを繋げる。
basic.yamlは「catkin_ws/src/dynamixel-workbench/dynamixel_workbench_controllers/config」の中にある。サーボの名前やサーボの個数が書いてあるので、これを4個に変更する。
具体的には下記のようにした。#で「Return_Delay_Time」をコメントアウトしているのは、これがあると2XLが動かないからである。「id1」と「ID: 1」でややこしい名前になってしまっているのが気になるが、後で軸の回転方向を変える可能性が高いので、「pan, tilt」などにしたくなかった。良い名前付けのアイデアのある人はそれに変更していただきたい。
ちなみに、basic.yamlを呼び出しているコードは「catkin_ws/src/dynamixel-workbench/dynamixel_workbench_controllers/launch」の中の「dynamixel_controllers.launch」の10行目にある。
# You can find control table of Dynamixel on emanual (http://emanual.robotis.com/#control-table)
# Control table item has to be set Camel_Case and not included whitespace
# You are supposed to set at least Dynamixel ID
id1:
ID: 1
# Return_Delay_Time: 0
id2:
ID: 2
# Return_Delay_Time: 0
id3:
ID: 3
id4:
ID: 4
Collapse
本記事はアフィリエイトプログラムによる収益を得ている場合があります
この連載の記事
- 第349回 生成AIなんでも展示会、想像以上に“なんでも”だった ホラーもぬいもロボも登場
- 第348回 動画の字幕つけ、こんなに楽になってたのか Adobe Premiere Proの自動文字起こしに今さら驚いた
- 第347回 AIで作った曲でDJした結果… 意外な壁があった
- 第346回 「そこそこ稼ぐおじさん」でいいのか? 迷ったあなたへ
- 第345回 順調なのに不安 その違和感、実は“次のサイン”です
- 第343回 メディアアート再燃?「TOKYO PROTOTYPE」に人が殺到した理由
- 第342回 休職中の同僚を「ずるい」と思ってしまうあなたへ
- 第341回 3Dモデルを必死にリギングした結果、「AIが優秀すぎる」ことに気づいた
- 第340回 VRChatでロボットになりたい筆者、最終的にBlenderを選んだ理由
- 第339回 復職が不安なあなたへ。“戻らない復職”を私が選んだ理由
- この連載の一覧へ
























