




























自動配送ロボの国内実用化を進めるには?アイシン、ドコモ、東芝、LOMBYが講演
「自動配送ロボのラストワンマイルシリーズ03」レポート
株式会社NTTドコモ「UR団地における、5G/4Gを用いた複数ロボットの遠隔監視・配送実証の実施」
株式会社NTTドコモは、UR団地で5G/4Gなどセルラー回線を活用した自動配送ロボットによる配送実証を実施。UR団地では、子育て世帯から高齢者まで幅広い居住者がおり、団地内の多様な困りごとを解決するひとつの手段としてロボットの活用が注目されている。
神奈川県横浜市金沢区のUR並木団地「金沢シーサイドタウン並木一丁目第二団地」を実証場所として実施。
内容は、居住者が事前注文した日用品をロボットで自宅前まで配送する、というもの。自動走行ロボットはテムザック社の電動車いすをベースに自動走行機能とロッカーモジュールを追加したものを3台同時に使用。ロボットの遠隔監視・操作などサービスに必要なシステムをNTTドコモが開発し、ロボットオペレーションは、実際の運用事業者となりうる日本総合住生活株式会社(JS)が担当した。
商品の積み込みや受け取りには顔認証システムを採用。自律走行はすべてGPSで行ない、位置補正にはネットワーク型RTK測量を使用。
オペレーターの管理画面には、ロボット1台につき2枚、計6枚の周辺映像を表示。走行中のロボットから360度映像をリアルタイムに伝送し、通常は見えない部分も確認できる仕組みだ。UIにはNTTドコモが提供するオンデマンド型交通システム「AI運行バス」を転用して車両管理や複数目的地への効率的な配車ルートの自動生成や、配達途中でのリアルタイムな呼び出しを実現。オペレーションは、ITやロボットの専門家ではない団地管理業務を行なうJSが担当したが、事前数回のトレーニングで3台の遠隔操作を問題なく実施できたという。
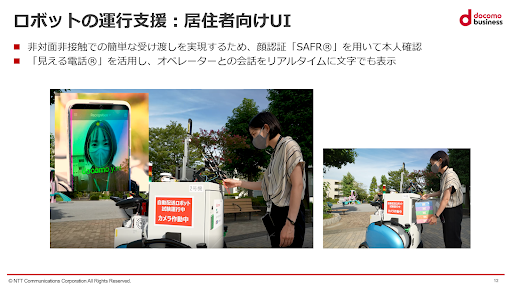
居住者とのコミュニケーションには、オペレーターとロボットを同社のサービス「みえる電話」を活用。オペレーターとの会話をロボット側の画面に文字で表示した。音声で双方向通話を行なえるようにすることでロボットに近づいてきた子どもに無人ではないことの認知を促せる効果があったそうだ。
また、団地内での多用途サービスを想定し、配送途中にアプリで割り込み・呼び出しを行ない、ルートを変更して業務用の荷物を運搬する、という検証にも成功している。
居住者アンケートでは、9割がロボット配送サービスに興味があると答えており、否定的な方はいなかった。また、5割の人が配送以外にも掃除や見守りなどの用途に活用してほしい、と答えている。
モニターとして参加した居住者からは、「重くてかさばる2リットルのペットボトル飲料とトイレットペーパーを同時購入できるのは助かる」、「小さい子供がいて買い物に出られないときにありがたい」といった声が得られたとのこと。
今後は、掃除や見守り、配送などロボットの活用シーンが広がっていくと考えられる。多種多様なロボットのオペレーションを簡易にするため、一元管理・協調制御の仕組みを目指していくとのこと。
講演後の質疑応答では、「オペレーターが画面注視から解放されるにはどのような機能が必要か?」という質問に対して、「自律走行が基本になれば、問題が起きたときのみアラートを発信することで、複数台の遠隔監視が可能になると考えられる」と回答。また、事業モデルについての質問として「配送料は団地の居住者から収受するのか?」という問いには、「ビジネス性を考えると配送だけで成り立たせるのは難しい可能性がある。業務用物品の配達、掃除や見守りなどにも使うことで管理業務のコスト削減にビジネス収益性を出していければ」と答えた。

NTTコミュニケーションズ株式会社 ビジネスソリューション本部 第二ビジネスソリューション部 第八グループ 市原 貴幸氏
株式会社東芝「移動ロボット協調連携システム~将来のロボット立ち往生問題、解決に向けて~」
自動走行ロボットの先進国では、メーカーの異なる複数台のロボットが狭い空間に混み合い、立ち往生する問題が起きている。現在の日本の配送ロボットは、遠隔操作で進路を変更できるが、他社が管理するロボットの進路を判断するのは難しい。将来、配送ロボットが普及した社会では、人や自動車の交通ルールのようにロボットにも共通の走行ルールが必要だ。
東芝では、2017年~2019年度のNEDO事業「ロボット活用型市場化適用技術開発プロジェクト」で、移動ロボットの連携システムの開発に取り組み、移動ロボットと運行管理システムを接続するためのインターフェース「AMR-IF(Autonomous Mobile Robot Interface)」の仕様を策定。
現在の移動ロボットは、各メーカーが上位システムの運行管理システムを開発し、独自のインターフェースで移動ロボットと接続しており、メーカーや種類の異なるロボットの導入を難しくしている。AMR-IFを活用すると、メーカーや種類が異なる複数の移動ロボットを共通システムで運用可能になる。
2019年12月に開催された「国際ロボット展2019」のNEDOブースでは、THK株式会社、株式会社セック、パナソニック株式会社と種類の異なる3台の移動ロボットの連携デモを実施し、1つの上位システムでロボットを管理できることを実証している。
令和2年度補正NEDO事業「自動走行ロボットを活用した新たな配送サービス実現に向けた技術開発事業」では、ロボット同士が直接通信する「移動ロボット協調連携システム」を開発し、①異種ロボット間の相互回避、②同種ロボットでの協調搬送の連携実証を実施した。
異種ロボット間の相互回避については、芝浦工業大学の移動ロボットと東芝の移動ロボットの2種を用いて深川江戸資料館の展示室内を走行して実証を実施。直接通信ユニットで他のロボットを検出し、相手の進路を避けられることが検証された。
同種ロボットの協調搬送については、2台の小型ロボットが直接通信することで長尺の6輪台車を協調搬送できることが確認された。

立ち往生問題の解決策としては、1)空港管制や信号機のような共通のシステムを使う方法と、ロボット同士の直接通信による回避の方法が考えられるが、いずれにしてもルールの標準化は必須だ。これらの標準化へ向けて、ロボット革命・産業IoTイニシアチブ協議会で移動ロボットの上位系インターフェースの仕様を検討している。
講演後は質疑応答を実施。「AMR-IFの国際標準化はいつ頃実現できそうか」という質問に対しては、「国際標準化に向けて動いているが海外と国内とで事情が違うのが課題。課題が顕在化されてからでは遅いので、ロボットが普及するよりも先に提案し、標準化を決めていくことが重要」と回答した。

株式会社東芝 研究開発センター 知能化システム研究所 機械・システムラボラトリー 研究主幹 山本 大介氏
本記事はアフィリエイトプログラムによる収益を得ている場合があります





