人と共生し産業を加速する次世代ロボット、要素技術が集結
「AI&ROBOT NEXT」レポート:革新的ロボット要素技術の研究発表
1 2
続いて、「革新的ロボット要素技術分野の発表:革新的ロボットインテグレーション技術」には、10名が登壇した。内容を要約して紹介する。
HRI行動シミュレーターで開発時間を大幅短縮

国際電気通信基礎技術研究所 研究員 佐竹聡氏
国際電気通信基礎技術研究所の佐竹聡氏は、人共存環境で活動するロボットの開発時間を削減するHRI(Human-Robot Interaction)行動シミュレーターを紹介。街や商業施設の案内や宣伝などサービスロボットのニーズは高いが、実店舗テストを繰り替えしながら開発するのは難しい。そこで、実店舗を再現したシミュレーション環境でのロボット開発を提案。セレッソ大阪メガストアのシミュレーション環境でテストしたところ、実店舗では約2時間かかる開発を20分まで短縮できたそうだ。
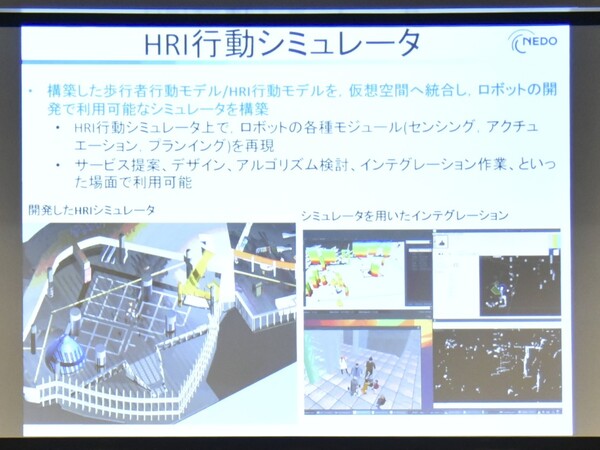
HRI行動シミュレーター
軽くタッチして人ごみをかきわける自律移動技術

パナソニック 主任技師 今岡紀章氏
パナソニックの今岡紀章氏は、混雑する場所でのロボットの立ち往生を解消するための研究を紹介。環境の混雑状況に合わせて経路生成し、混雑している場合は、通路をふさいでいる人に軽く接触して不快感を与えずに気付いてもらう制御方法を提案した。
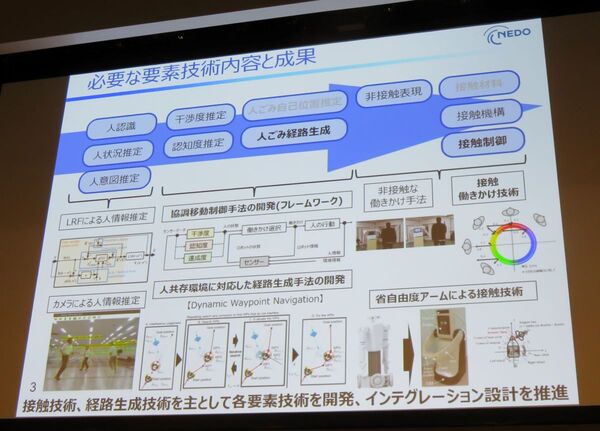
環境に応じた経路判断や働きかけに必要な要素技術
知識の構造化によるロボットの知的行動の発現研究開発

明治大学理工学部 専任教授 黒田洋司氏
都市のビルや施設は、エスカレーター、エレベーターなど複数の移動インフラがあり、人と同じように移動するには高度な判断力が必要だ。明治大学の黒田洋司氏は、環境に応じて適切に行動する自律システムの研究開発について紹介。研究成果を実用化するため、2016年にスタートアップSEQSENSE(シークセンス)社を創立し、歩行者の行動予測AIやエレベーターの自律搭乗機能をもつロボットを開発した。大手町パークビルにて業務運用を開始している。また、新型機として高機動型実験機CCVを開発中だ。
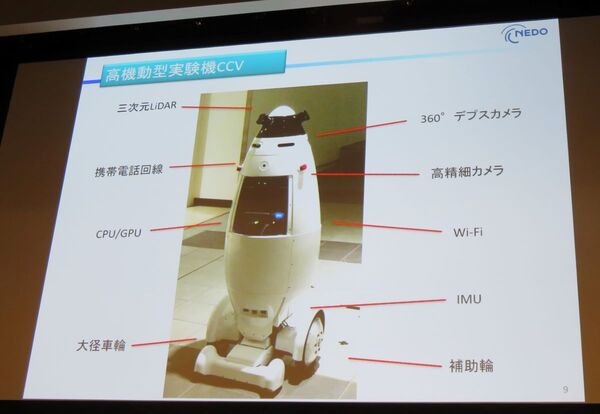
高機動型実験機CCV
IoT時代に対応した「ORiN3」

一般社団法人ロボット工業会 客員研究員 高本治明氏
一般社団法人ロボット工業会 高本治明氏は、ミドルウェア「ORiN(オライン)」の次世代版「ORiN3」を紹介。ロボットに限らず、あらゆる分野のサービス、デバイスに幅広く対応したオープンなプラットフォームの実現を目指す。
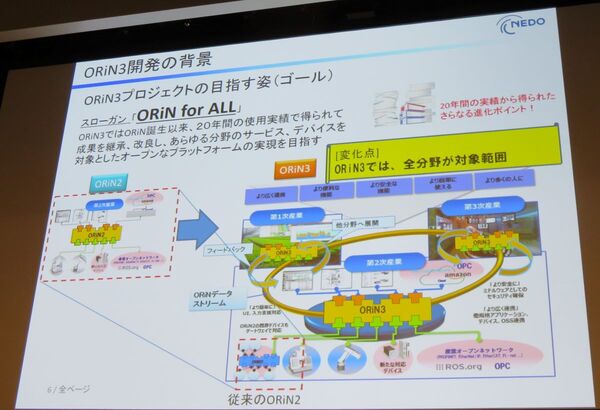
ORiN3はあらゆる分野が対象に
人間らしい目を実現する、煙の先が見えるLidar

国立研究開発法人産業技術総合研究所 電子光技術研究部門 招聘研究員 上塚尚登氏
人間は、超低速な眼球移動で見たいところだけを見る効率的な視覚システムを持つ。産業技術総合研究所の上塚尚登氏は、この人間のような目を実現するLidar(レーザーによる画像検出・測距)を紹介。開発したスキャナー「MultiPol」は、見たい部分を詳しく見る、重みづけスキャンが可能だ。自動運転などへの実用化を目指している。
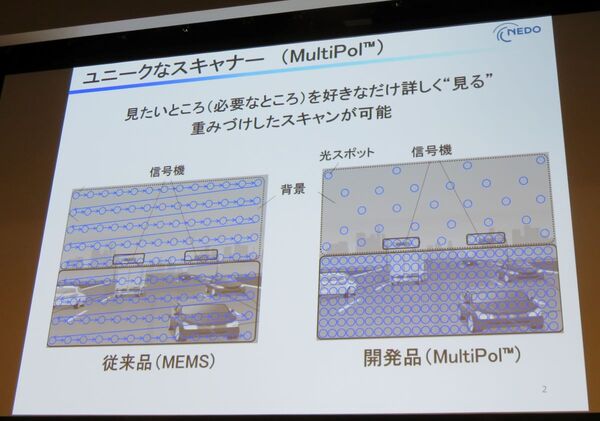
人間の目のように見たい部分だけを詳しく見る「MultiPol」
非整備環境対応型高信頼ヒューマノイドロボットシステム

国立研究開発法人産業技術総合研究所 知能システム研究部門 ヒューマノイド研究グループ長 金広文男氏
住宅や航空機、船舶など大きな構造物の建築・組み立て現場では、ロボットに合わせて作業環境を整備することが困難なため、自動化があまり進んでいない。そこで、産業技術総合研究所のヒューマノイド研究グループは深層学習を用いて作業現場の対象物を認識・追跡する技術と、足場や階段を移動するための多運動接触技術を開発。2025年までに実用化体制の構築を目指す。
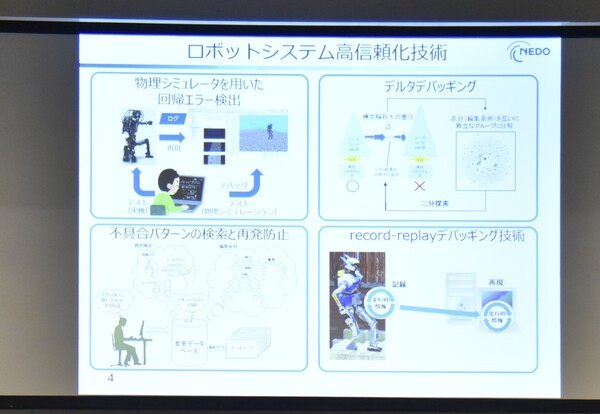
ロボットの高信頼化技術
イメージセンサーを用いた環境認識処理の高速飛行体への適用

エアロセンス株式会社 技術開発部 村越象氏
エアロセンス株式会社は、建築進捗管理や災害時医薬品輸送に向けた、ドローンの目視外飛行を実現するための長距離通信・センシング・垂直離着陸飛行技術を紹介した。2019年10月には離島間の緊急医療用品輸送の実証実験として、LTE通信を用いた目視外飛行を実施。センシング技術として、グローバルシャッターカメラからVisual SLAMで点群を検出することで、障害物回避を実現する。
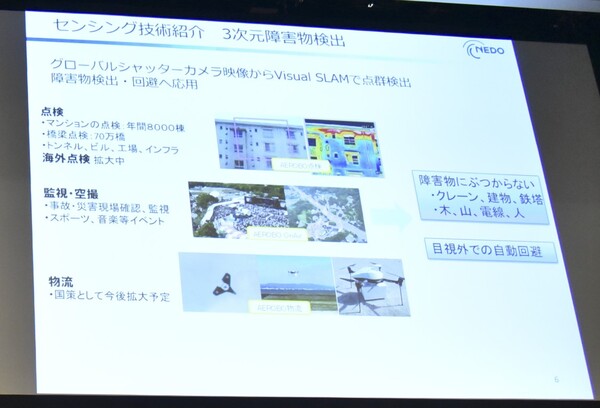
グローバルシャッターカメラで三次元障害物を検出
人の手に近い高性能で堅牢性を併せ持つロボットハンドの開発

東京都立産業技術高等専門学校 特任准教授 深谷直樹氏
東京都立産業技術高等専門学校 特任准教授の深谷直樹氏は、独自の“からくり”を用いて、さまざまな形のものを把持できるロボットハンドを開発した。人の指のように、対象物になじんで自然に関節が曲がる「協調リンク機構」で、センサー不要・少ないモーター数でモノをつかめる。応用例として、農作業ロボット向けの人型ロボットハンド、産業用の丈夫でパワーのある3指ハンド、食品工場などで使い捨てできる紙製のオリガミハンドの3つを紹介した。

人差し指と中指の先をねじって掴む「指先なじみ機能」
人の手のように優しく巧みな力加減ができる汎用人工手の研究開発

慶応義塾大学 システムデザイン工学科 村上俊之氏
慶應義塾大学システムデザイン工学科 野崎研究室では、人間のように柔軟な力加減を制御できる力触覚伝達技術「リアルハプティック」を用いた小型の汎用人工手を開発している。力触覚の伝送モジュールを力触覚の推定に特化した小型モータドライバーをマイクロテック・ラボラトリー社から2020年4月に販売予定だ。また、力触覚技術を搭載したICチップの開発にも成功しており、実用化を進めている。

力触覚技術を応用した双腕型ロボットの実用化を目指す
ドローンの事故を防ぐ安全飛行管理システム

ブルーイノベーション株式会社 コンサルティングサービス部 次長 酒井和也氏
ブルーイノベーション株式会社は、ドローンの墜落や事故を防ぐための安全飛行管理システムとして、「無人航空機用フライトレコーダー」、「事故原因解析システム」、「事前飛行計画確認システム」を開発。現在のパイロットの操縦によるドローン飛行から、将来的は、ドローンに搭載されているロガーがデータ通信でルート情報を得ながら自動飛行する機能の開発を目指す。
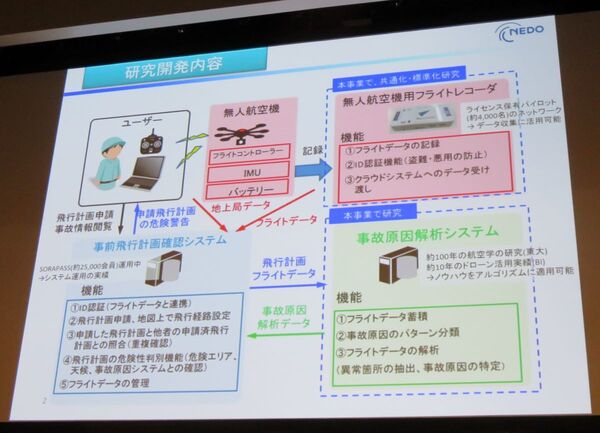
NEDOの事業では事故原因解析システムを研究
1 2
本記事はアフィリエイトプログラムによる収益を得ている場合があります