人と共生し産業を加速する次世代ロボット、要素技術が集結
「AI&ROBOT NEXT」レポート:革新的ロボット要素技術の研究発表
1 2
NEDO(国立研究開発法人新エネルギー・産業技術総合開発機構)は2020年1月16日・17日の2日間、シンポジウム「AI&ROBOT NEXT」を新宿LUMINE 0(ルミネ ゼロ)にて開催した。ここでは、17日に実施された革新的ロボット要素技術分野の発表「革新的なアクチュエーション技術」および「革新的なロボットインテグレーション技術」をレポートする。
PVCゲルアクチュエーターによる腰サポートツール
「革新的ロボット要素技術分野の発表:革新的なアクチュエーション技術」では、7名が登壇し、各研究成果を発表した。

信州大学繊維学部 特任教授 橋本稔氏
信州大学繊維学部 特任教授 橋本稔氏は、可塑化PVCゲルアクチュエーターによるウェアラブルロボットの開発について発表。電圧をかけると陽極に凝集するPVCゲルの特性を利用し、アクチュエーターを伸縮させることで、脊椎起立筋の力をアシストする仕組みだ。現在は、介護や農作業、物流など労働向けの腰サポートウェアとしてプロトタイプを開発し、2021年以降の商品化を目指している。
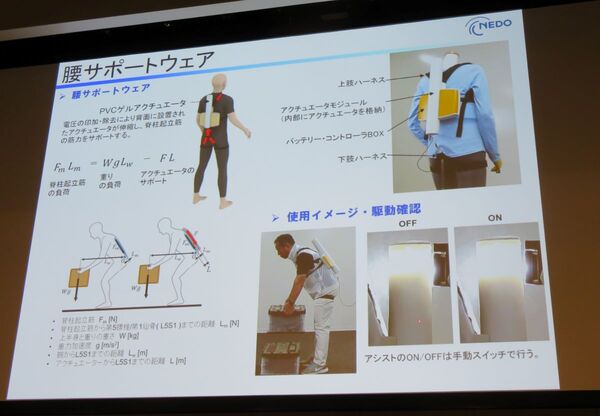
PVCゲルアクチュエーターを用いた腰サポートウェアのプロトタイプ
高減速ギアを備えた高出力アクチュエーターの研究開発

横浜国立大学 教授 藤本康孝氏
横浜国立大学 教授の藤本康孝氏は、高減速かつ逆駆動が可能な「バイラテラル・ドライブ・ギヤ」を紹介。ロボット用のギアの抱える3つの課題(高回転のモーターとの相性の悪さ、エネルギー回生の効率、バックドライバビリティ)を解決するものだ。複合遊星歯車機構に動力伝達効率を最大化する設計手法を適用し、減速比は10分の1から1000分の1まで幅広く対応する。試作した減速機では、減速比102.1分の1、駆動効率は順逆ともに90%を超える高効率を実現している。
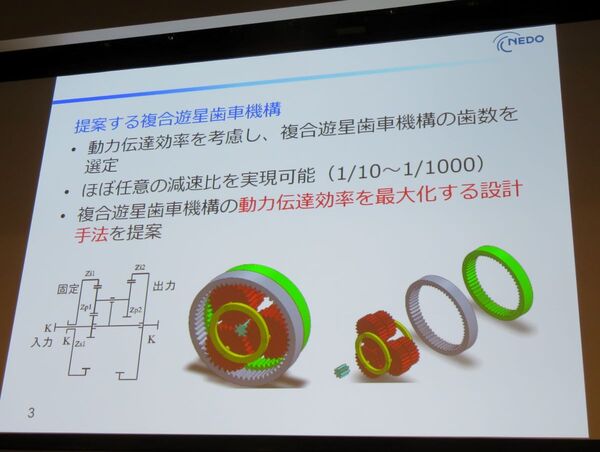
バイラテラル・ドライブ・ギヤの構造
現在は、日本電産シンポ株式会社へ技術提供し、実用化を進めている。また、共同研究や貸し出しプログラムにより、製造業向けロボットやアシストロボットなど幅広い分野への利用を目指している。
段差のある路面もスムーズに動く全方向駆動機構の開発
東北大学 准教授の多田隈建二朗氏は、「全方向駆動機構を核とした革新的アクチュエーション技術の研究開発の実際」と題し、コンパクトな車輪で段差のある場所でもなめらかに全方向へ動く「球状全方向車輪機構」を紹介。路面に対して線接触であるため、点字ブロックや絨毯、芝生の上でもスムーズに走行可能だ。
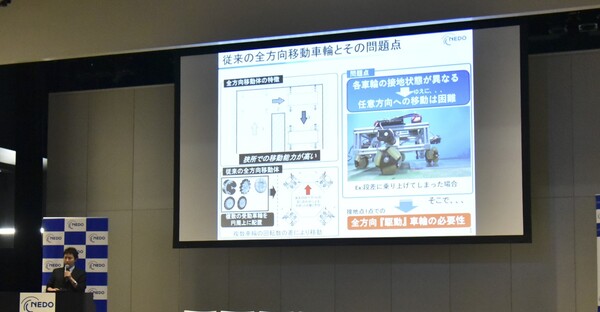
東北大学 多田隈建二朗氏による「球状全方向車輪機構」の紹介
スライドリングマテリアルを用いた軽量・柔軟なアクチュエーター

豊田合成株式会社 竹内宏充氏
豊田合成株式会社の竹内 宏充氏は、高分子の架橋に関する原理とそれを利用した分子による高分子素材である「スライドリングマテリアル」を用いた誘電アクチュエーターセンサー「e-Rubber」とその応用事例を紹介。
医療分野でのe-Rubberの適用としては、心臓の動きを再現する心臓手術訓練シミュレーター「SupeR BEAT」(EBM社と共同開発、2019年10月に販売済)に採用されている。心臓のバイパス手術は15分以内で終えなければならないが、e-Rubberは速い動きにも対応し、心臓の動きをリアルに再現できるという。またe-Rubberの軽量・柔軟性を活かした製品として、触覚を遠隔で伝送する「指先ソフトハプティクス」を紹介した。

心臓手術訓練シミュレーター「SupeR BEAT」
ウェアラブルアシスト機器のためのソフトアクチュエータシステム

中央大学・助教 奥井学氏
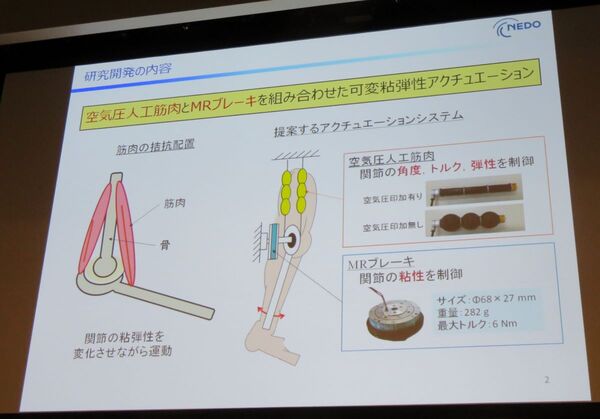
中央大学の奥井 学氏のチームでは、ウェアラブルロボット向けに、人間の動きに合わせて形を変えられるアクチュエーションシステムを開発している。独自開発の軽量・安価な高出力型空気圧人工筋肉と薄型・軽量MR流体ブレーキを組み合わせて、人間の関節のような粘弾性を再現。動いてないときも装着者の動きを妨げず、必要なときだけアシスト特性を持つ。NEDOのプロジェクトでは、人工筋肉の長寿命化、オンライン駆動する関節モジュールの開発、要素技術として、携帯可能なハイブリット空気圧源の研究にも取り組んでいる。
展示ブースでは関節モジュールのデモが行なわれた
トウモロコシや唐揚げを吸着移動できる食品対応吸着パッド

名城大学 理工学部 メカトロニクス工学科 准教授 市川明彦氏
名城大学 理工学部メカトロニクス工学科のチームは、凹凸面のある野菜などの食品を吸着移動するための濡れ性を用いた吸着パッド「SWA(Super Wet Adsorption)パッド」を開発した。パットの毛細管から出る水が凸凹部分を埋め、真空崩壊を防ぐことで吸着把持する仕組みだ。素材には食品衛生法に適合した塩、オリーブオイル、ゼラチンのみを使用。共同研究先のSMC株式会社での耐久試験では2.8万回の耐久試験をクリアし、現在、製品化を進めている。
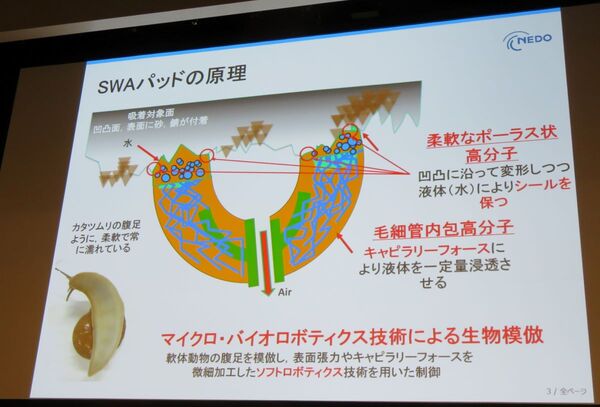
SWAパッドの原理
石油や電気不要、化学エネルギーで駆動する「分子人工筋肉」

東京工業大学 特任教授 小長谷明彦氏
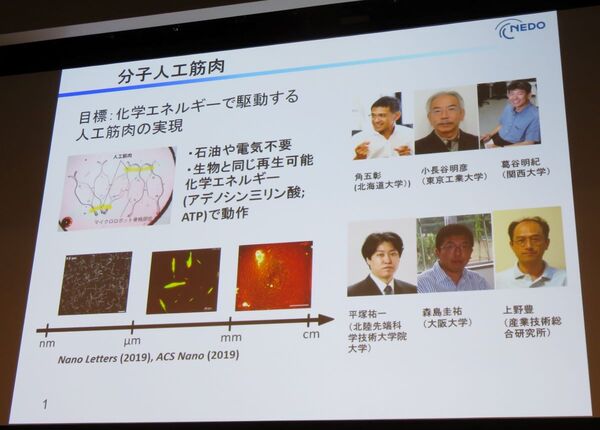
東京工業大学の小長谷明彦氏は、分子から作る「人工筋肉」を紹介。石油や電気を使わず、生物と同じように化学エネルギー(アデノシン三リン酸)だけで動く人工筋肉の実現を目指し、全国6拠点で研究開発に取り組んでいる。北海道大学・関西大学では、光造形可能な分子人工筋肉を開発。北陸先端大学・大阪大学では、人工筋肉の光造形システムを開発。東工大と産業技術総合研究所の共同開発では、人工筋肉の分子部品の設計を支援するVRシミュレーションシステムを開発している。
分子人工筋肉の研究
1 2
本記事はアフィリエイトプログラムによる収益を得ている場合があります