「触覚」を精緻にデジタル化、力触覚技術「リアルハプティクス」が真のメタバースを創造する
リアルハプティクスを実装するAbcCoreチップ
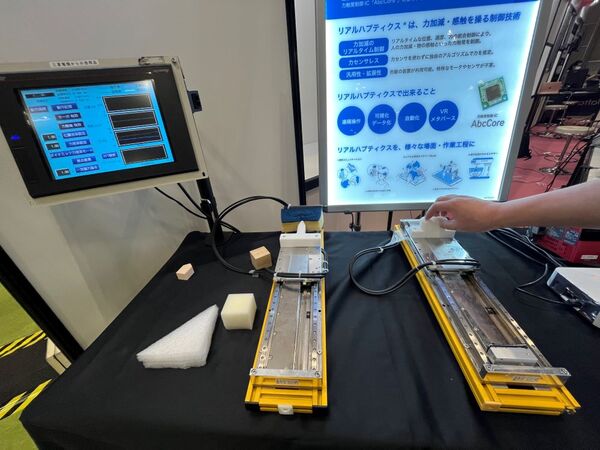
モーションリブは、さまざまなアクチュエータにリアルハプティクスを実装するためのICチップ「AbcCore」を開発した。このチップを用いることにより、例えばロボットアームにケーキやポテトチップを持てるように力加減を制御する機能を持たせられる。

また、AbcCoreに2台のアクチュエータを接続し、互いを同期させることにより、遠隔地の力触覚情報を伝え合うことができる。伝送される力触覚情報はデジタルデータであるため、力の拡大/縮小が可能になり、人間の五感(力触覚)を拡張できるようになる。
このようなハプティクス技術の実装に向けた研究・開発に取り組む企業はいくつかあるが、その多くが専用のハプティクスセンサーやハプティックモーターなどを必要としている。AbcCoreでは1つのセンサー情報から独自の力推定アルゴリズムによって負荷力を算出しているため、力センサなど特殊な機器を設置することなく、システム構築やメンテナンスのコスト低減を実現している。
AbcCoreを用いてシステムにリアルハプティクスを実装すると、大きく4つのことが実現できる。1つは作業対象物の物理特性をデータ化・可視化で、固いのか柔らかいのか、重いのか軽いのか、一定の力で押していくと途中で(折れる、割れるなどして)特性が変わるといったことをデータ化することができるようになる。

そのデータをネットワークで送ることにより感触を伴った遠隔操作が実現できる。また、人間が行った動きを記録しておけば、同じ作業をロボットに行わせることができるので、これまで人がやっていたことの自動化が可能になる。
「この手法では、人間による『うまくいった』情報から学習を始めることができる。したがって学習時間を格段に減らすことが可能になる」(溝口氏)
また、感触のデータ化を仮想空間に応用すると、現実には存在していないものに対するインタラクションをメタバース内で実現できる。例えば炎をまとった剣でスライムを切る、といった現実にはないような触感もゲームで体験できるようになるだろう。あるいは、重力パラメータを5分の1にして、月面のような簡単には行くことのできない場所で走ったらどうなるかをシミュレーションすることもできるようになる。
本記事はアフィリエイトプログラムによる収益を得ている場合があります