力制御の技術を強みにロボットで世界を目指す 積極的な知財活動で大手企業とも対等に連携
【「第5回IP BASE AWARD」スタートアップ部門グランプリ】東京ロボティクス株式会社 代表取締役 坂本 義弘氏インタビュー
この記事は、特許庁の知財とスタートアップに関するコミュニティサイト「IP BASE」に掲載されている記事の転載です。
第5回 IP BASE AWARD「スタートアップ部門」でグランプリを受賞した東京ロボティクス株式会社は、力制御可能な人型ロボットを開発するロボティクススタートアップ。研究開発者向けロボットの開発から、産業向けにデータセンターの保守管理や物流のピッキング作業などのロボットを活用したソリューションを展開している。事業戦略に連動した知財の構築と活用について、東京ロボティクス株式会社 代表取締役 坂本義弘氏に伺った。

東京ロボティクス株式会社 代表取締役
坂本 義弘(さかもと・よしひろ)氏
早稲田大学理工学研究科機械工学専攻修了。博士(工学)。専門はロボット工学と測位技術。これまで、大学の研究者・フリーランスエンジニアとして、組み込み系開発から高周波回路設計、ロボット開発、Web・DBシステム開発、Windowsアプリ開発、サーバインフラ構築、データ分析など、様々な業務を経験。現在はロボット技術のビジネス化に興味を持っている。早稲田大学次世代ロボット研究機構 招聘研究員。歴史好き。
研究開発にもとづいた産業向けロボットを提供
東京ロボティクス株式会社は、2015年設立の早稲田大学発ロボティクススタートアップだ。設立当初は研究開発者向けのロボットアームの開発からスタートし、2本のアームが付いた双腕ロボット、双腕ロボットの下半身に移動用台車を付けた人型ロボットへと拡張してきた。現在の事業としては、研究開発者向けに人型ロボットを販売するほか、産業向けの移動マニピュレーターを物流のピッキング作業やデータセンターの遠隔監視作業用に提供している。

データセンター用ロボット「Togros-DC」は、ロボットアームの手先にカメラが付いており、エンジニアが遠隔監視でデータセンター内のサーバー機器の点検作業を行う。
物流ソリューション用ロボットの「Torobo GTC」は、移動マニピュレーターを用いたピッキングソリューションで、物流倉庫の棚から商品をピックアップしてカゴ車などへの搬送が可能だ。
産業向けソリューションを展開するきっかけとなったのは、JAグループが行う「JAアクセラレーター」第3期(2021年)への採択だった。
坂本氏は当時を振り返り、「最初はディープラーニングで野菜を認識して、作物を選り分けるカメラ付きのピッキングロボットを開発していました。しかし現場に行ってみたら、人が選別するほうが圧倒的に速くてロボットじゃ対抗できませんでした。そんな中、現場の方たちと話をしているうちに、『野菜が入った重たい箱を持ち上げてコンベアに流すのが大変だ』とか『棚からいろんな物品をピックアップして運ぶようなものはできないか』といったことを聞きました。ならば、そうした重労働をロボットにさせたらいい、という考えに変わりました」と話す。
従来こうした作業用には、高い棚にエレベーターのように上がっていって物を取る昇降式のピッキングマシーンがあったが、スピードが遅く生産性があまり上がらなかったそうだ。これに対し、同社ではシリアルリンクと呼ばれる多関節の制御技術によってロボットアームを人間の腕のように動かすことで、高いところでもアームを伸ばして安定したピッキングができ、積み荷もより素早く行える利点があったという。
「人間の腕と同じ動きをロボットで再現するには、腰関節を含めると十軸の連動が必要になります。我々はこの連動制御の設計を得意としています。コストを下げるためにシンプルにしたのが、移動台車の上にアームを載せた移動マニピュレーターのソリューションです」(坂本氏)
人と共存するロボットは人と同程度のスペックであるべき
ハードウェアからソフトウェアまで自社開発しているのも同社の特徴だ。目的とする動作に応じて力加減を制御する「力制御」を多関節で行う技術は、複数のモーターの同期制御や数学的な運動力学なども関係するため、モーターレベルから自分たちで作り込む必要があるからだ。
「特許以上にノウハウによる参入障壁がすごく高い領域だと自負しています。現時点で力制御のできる人型ロボットが作れるのは世界でも限られているでしょう」と坂本氏。

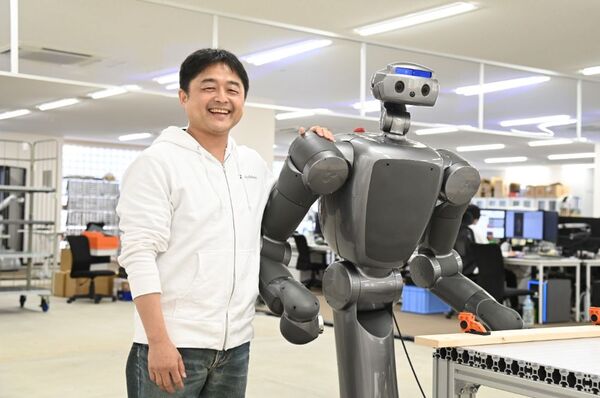
高い力制御技術のベースとなっているのは、大学時代の研究から培ってきた設計思想だという。「人と共存するロボットは人と同程度のスペックであるべき、というのが我々のコンセプト。小さすぎると人と同じ作業ができないので、高さは170センチ程度、力は片手を伸ばした状態で6~7kg、曲げた状態なら瞬間的に20kgくらい持てるような設計です」。
ロボットは人間よりもはるかに大きな力が出せる気がするが、実際は、人と同じサイズのロボットには人と同程度の力しか出せないそうだ。そのうえで重要なのが力制御だ。
「ドアを開ける、物を持つ、窓を拭くといった動作には、関節の柔らかさと優しく触れられる力加減の調整が必要です。他のロボットの場合、ドアの開閉をさせるには事前に正確な位置や寸法などの知識を与えなくてはいけませんが、弊社のロボットは関節が柔らかいので、それらを正確に知らなくてもドアをスムーズに開けられます」(坂本氏)
実際にロボットを見せてもらうと、人の体と同じように全身の関節が連動して、柔らかく滑らかに動く。姿かたちは必ずしも人と同じにすることにはこだわっておらず、ハンドは4本指だ。一定の力を出すには指が太いほうが効率が良く、4本の指があればたいていの作業ができるからだそうだ。また、現場での安定走行を重視し、足元は2足歩行ではなく台車型を採用している。
シナジーのある事業会社からの出資でソリューション展開
ロボット開発には大きな資金力が必要だが、創業から5年間は投資家からの出資は受けずに、研究開発用ロボットの売上をやりくりしながら開発を続けていたという。転機となったのは、2020年1月のヤマハ発動機株式会社との資本技術提携だ。
「大きな資金を得て、ようやくソリューションに手を伸ばすことができるようになりました。ロボットの開発は時間軸が長いうえに失敗の確率も高いので、投資家にはなかなか興味を持ってもらえない。一方で、ヤマハ発動機さんのようにシナジーを見込める事業会社とは相性がいいように思います」(坂本氏)
2021年にはモーターメーカーの株式会社五十嵐電機製作所とも資本業務提携し、2億円の資金調達を実施している。
国内でのソリューション展開に加えて、人型ロボットは研究プラットフォームとして海外への営業も進めているとのこと。
「ソリューションで使っているのは移動マニピュレーターですが、これらの導入現場から集めた実データを学習させて、汎用人型ロボットへとつなげていきたいという目論見があります。そのためにもソリューションを増やしていきたい」
今後は移動マニピュレーターだけでなく双腕ロボットや人型ロボットを用いて、工場での組立やクリーンルームでの機器操作、施設の清掃などのソリューションを開発・提供していく予定だ。
スタートアップにも「したたかさ」があっていい
第5回 IP BASE AWARDのグランプリ受賞では、知財権やノウハウ管理による開発成果の保護を徹底したうえで、契約などのビジネス活用も積極的に行っている点、また複数事業のそれぞれに整合する知財戦略の構築、大企業とのアライアンスにおいて工夫した知財管理などが高く評価された。
坂本氏が知財を意識するようになったのは、創業以前に知財に関する本を複数読んでいたのがきっかけだそう。
「パテントトロールが大企業に法外な費用を要求する事例が載っており、すごい話だな、知財にこれだけ影響力があるのかと興味を持ちました。巨額の損害賠償の話もあり、特許はすごく強力な武器になる、と感じました」(坂本氏)

また、大学の研究職に就いていたころには、実際に大手メーカーとの契約交渉に主体となって関わった経験もあり、企業の知財に対するこだわりの強さを実感したと坂本氏は話す。こうした知財の強力なイメージから、創業時から弁理士に顧問を依頼しているという。
東京ロボティクスの知財戦略のポイントを聞いた。
「大手企業との協業では常に対等であること。相手が課題とお金を出す代わりに、僕らは技術とソリューションを提供するので、そこは対等です。仮に知財が共同保有になったとしても、お互い自由な実施権を持つなどの条件をきっちり固めること。また、組む相手との役割分担を明確にし、むやみに共同開発はしないようにしています」
大手通信会社との協業では、先方は通信や画像伝送、東京ロボティクスはロボット開発、と契約書に分担を明記したそうだ。そうすることで、共同開発中に生まれた知財の所有権がどちらにあるかも明確になる。
とはいえ、大手企業と対等な立場に立てるのは、それだけの自信と力があればこそ。相手側に「どうしても組みたい」と思わせられる技術や強みを持っていることが大前提だ。
また一方で、スタートアップには、大手企業と渡り合いながら自分たちを守るために、いい意味での「したたかさ」が必要でもあるだろうと坂本氏は言う。
「例えば、大企業との共同研究の際、大企業側は予算確保から契約締結までに数カ月かかることがある。その折衝期間の間に、自分たちが作り込んできた重要な部分を知財化できるかもしれない。また、共同開発中に思いついたアイデアの種は共同研究とは別に大事に残しておいて、契約期間が終わってから具体化して特許を申請するなど、戦略的なしたたかさも持っていいと思います」
専門家との密な連携、社員向け研修やノウハウ管理など知財活動にも積極的に取り組む
東京ロボティクスでは、社内に専任の知財担当者は置かずに、外部の弁理士・弁護士と顧問契約を結び、密に連携しながら知財活動を行っている。
社内の知財活動としては、CXO陣と外部の弁理士とで知財戦略の定例会を月1回は開くほか、Notionを使ってノウハウを管理しているそうだ。社員向けの知財啓蒙活動にも力を入れており、職務発明制度の導入、年2回の新卒者向けの知財セミナーや明細書の書き方の研修などにも取り組んでいるという。
特許クリアランス調査は外部に任せず、自分たちで行っているそうだ。
「他社の特許を見ると学びになります。気になる特許が見つかれば弁理士の先生に相談し、フィードバックをもらうことで、社員のリテラシーも上がっていると思います」(坂本氏)

こうした積極的な知財活動の成果は大手企業との連携にも表れているという。
「はっきりと目に見えた成果はヤマハ発動機さんとの資本技術提携です。もちろん強みとなる技術を持っていることが前提ですが、契約前に重要な特許2、3件の権利化が完了し、海外出願もしていたのは大きかったと思います。またソフトウェアを含めてノウハウの記録を残していたことが、大きな金額の契約締結につながりました」
出資後は知財に関する予算にも余裕ができ、より出願しやすくなったそうだ。
最後に今後の展開について、坂本氏に伺った。
「今はヒューマノイドロボットが注目されており、米国や中国で盛り上がっています。かつては日本が強かった分野なのに、今では米中に太刀打ちできる会社が少なくなってしまった。我々がその一角に立ちたい。とはいえ、中国は政府が一丸となって取り組んでいますし、米国は西海岸の潤沢な資金力があり、その中で日本のスタートアップが単独で戦うのはなかなか厳しい。そこで、まずは地に足を付け、現場のソリューションからデータを集めて、そのデータを生成AIの基盤モデルに生かせないかと考えています」
基盤モデルを使えば人の動きの動画を生成できるので、そこにロボットのデータを組み合わせれば、ロボットに人の動きを再現させることが可能になりそうだ。実際に、米国の基盤モデルを開発する企業がロボット開発に出資し始めているという。
将来の目標として、「僕らは人間でいうところの小脳の運動制御が得意なので、世界の誰もかなわないレベルまで高めていきたい。そして、向こう3~5年は地道に現場のソリューションを通してデータを集め、ゆくゆくは大脳部分である基盤モデルを内製し、ロボットを本当に社会に実装できるような世界を作っていきたい」と語ってくれた。
本記事はアフィリエイトプログラムによる収益を得ている場合があります