ロボットハンドの指先カメラで触覚を実現するFingerVision、新製品ラインアップを販売開始

FingerVisionは6月27日、ロボットハンドの新製品ラインアップを販売開始した。
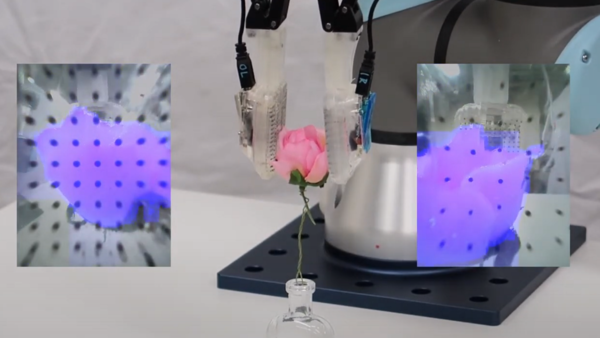
同社のロボットハンドは「画像(カメラ)をベースに触覚を再現する」というコンセプトをコア技術とし、ロボットハンド等の指先にカメラを搭載することで、触覚(力や滑りの分布等)を知覚できるようになり、人が「手のひら」の感覚を使って物体を扱うような“いい感じの”制御をロボットで実現。
従来、販売していた「1種類のサイズ・形状」と「2種類の触覚情報(力、滑り)」を標準とした視触覚ロボットハンドに加えて、今後はさまざまなニーズに応えるためにロボットハンドの先端部(以下、フィンガー)や視触覚情報(力、滑りだけでなく、堅さや位置情報など)のバリエーションを格段に充実させた製品ラインアップとする。
以下の4つの標準ラインアップを用意。

Cyl1:局面形状の把持面により、円筒形のワークやブラシのように束ねられているワーク、小型のウエハーなどのハンドリングを実現

SS2:人の指先よりも細い形状で、バラ積みピッキング時/プレーシング時のスペースが狭い場合や、小型ワークへの汎用的な対応を実現

α on β:グリッパーからの距離を近くすることで把持力をロスなく伝達できるようになる

M6:食品業界の「おかず盛付ロボット」に使用されているフィンガーと同形状。不定形なワークに対して、少ない把持力でのナイーブなハンドリングを実現
以下のような応用が可能、

L1:手のひらサイズの大きめの把持面により、より多くの面をワークと接触させることで、少ない把持力でのハンドリングが可能になる

D2:すくい上げる形状を作ることで、平らな形状や脆いワークなどのハンドリングを実現
同社では今後もさまざまなフィンガーや視触覚情報を随時ラインアップに追加するとしている。
「ASCII STARTUPウィークリーレビュー」配信のご案内

ASCII STARTUPでは、「ASCII STARTUPウィークリーレビュー」と題したメールマガジンにて、国内最先端のスタートアップ情報、イベントレポート、関連するエコシステム識者などの取材成果を毎週月曜に配信しています。興味がある方は、以下の登録フォームボタンをクリックいただき、メールアドレスの設定をお願いいたします。

本記事はアフィリエイトプログラムによる収益を得ている場合があります