特許から見るIPOをした大学発ベンチャー
上場を果たした研究成果ベンチャー3社を分析
自社で研究を行ない単独で特許出願を行なっているCYBERDYNE株式会社
サイバニクス技術(人・ロボット・AI・情報系の融合複合技術)を駆使したロボット・装着型サイボークの開発を行なっているCYBERDYNE株式会社を分析してみよう。
出願数の経緯およびパテントランドスケープの結果から、CYBERDYNEの主力製品となっているパワードスーツ(人工補助装置)開発については、筑波大学との共同研究を継続して行なうとともに、その他のロボット技術やロボット制御に関する技術の開発については、自社で研究を行ない単独で特許出願を行なっていることを読み取ることができる。
●CYBERDYNE株式会社 会社概要
・沿革:2004年6月設立。2014年3月マザーズ上場
・関連大学:筑波大学
・時価総額:約500億円
出願数の推移
設立前の2001年に1件出願したあと、しばらく出願していなかったが、2007年ごろから再度出願を行なうようになり、概ね年10件前後の出願数を維持している。なお、出願案件の半数以上は筑波大学との共同出願である。

最初の出願内容
最初の特許出願は、日本大学と筑波リエゾン研究所(筑波大学のTLO)との共同出願となっており、両者から権利譲渡を受けて現在はCYBERDYNE社単独での権利となっている。
特願2001−25624(心機能評価装置)
【出願人】
【氏名又は名称】学校法人 日本大学
【氏名又は名称】株式会社筑波リエゾン研究所
特許第4674978号
【請求項1】
心臓の機能を補助するための人工心臓として、左心室から脱血して大動脈に戻すための遠心型ポンプを用いている患者の心臓の機能を評価する心機能評価装置であって、前記遠心型ポンプの流量を測定する血液流量計と、この血液流量計で測定した血液流量の時間微分を演算する演算装置と、前記演算装置の演算結果に基づいて、前記血液流量の時間微分の経時変化波形を表示する表示部と、を有し、前記表示部の前記血液流量の時間微分の経時変化波形によって心機能を評価することを特徴とする心機能評価装置。

共同出願人
国立大学法人筑波大学
日本メクトロン株式会社
大和ハウス工業株式会社
国立大学法人東海国立大学機構
パテントランドスケープ
パテントランドスケープと公開公報を検証することにより、出願全体でもメインとなっているロボット技術や検出技術については自社で開発をしているが、主力分野のひとつである腰や関節をサポートするパワードスーツ関係については筑波大学と開発をしていることを読み取ることができる。
①全出願

②単独出願

※赤色領域の主な出願
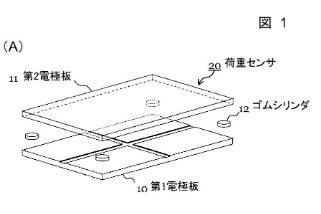
特開2020-187069(触力覚検知装置)
【請求項1】
複数の正極が同一平面上かつアレイ状に配置された第1電極板と単一の負極が配置された第2電極板との間に当該正極と同数の粘弾性体からなる所定形状のシリンダをそれぞれ介挿して複数のコンデンサを形成する静電容量式の荷重センサと、前記荷重センサの前記第2電極板に加えられる外力に応じて変化する前記各コンデンサの静電容量を検出する静電容量検出部と、前記静電容量検出部により検出された前記各コンデンサの静電容量の変化量に基づいて、それぞれ前記シリンダに加わる荷重の分布を表す分布荷重を計測する分布荷重計測部と、前記分布荷重計測部により計測された分布荷重に対する前記各シリンダの伸縮量および当該分布荷重のパターンの関係性に基づいて、前記荷重センサの前記第2電極板に加えられる外力の総荷重および荷重中心位置を算出する荷重情報算出部とを備えることを特徴とする触力覚検知装置。
特開2020-131377(自走式ロボット)
【請求項1】
自律的にまたは外部操作に応じて床面を走行する自走式ロボットにおいて、一対の駆動輪を同時にまたは独立して回転駆動してロボット本体を所望方向に走行させる走行駆動部と、少なくとも1以上の関節機構を有するアーム部の端部を支持し、かつ、鉛直方向を回動中心として前記アーム部と一体となって前記走行駆動部に対して回動自在に当該走行駆動部の上段に連結されたアーム支持部と、前記走行駆動部に対する前記アーム支持部の回動位置および前記アーム部の姿勢状態に基づいて、前記ロボット本体の重心位置を算出する重心位置算出部と、前記走行駆動部の前記床面に対する傾き角度を検出する傾斜角度センサと、走行方向に対するロール軸およびピッチ軸をそれぞれ回転中心とする前記アーム支持部の2軸合成加速度を検出する加速度センサと、前記走行駆動部および前記アーム支持部をそれぞれ駆動制御する制御部と、を備え、前記制御部は、前記走行駆動部の駆動時に、前記傾斜角度センサおよび前記加速度センサの検出結果に基づいて、前記アーム支持部の回動位置および前記アーム部の姿勢状態を前記ロボット本体の重心位置を変化させるように調整しながら、当該ロボット本体の動的安定性を維持することを特徴とする自走式ロボット。

③共同出願(筑波大学)

※赤色領域の主な出願
再公表2017/142082(装着式歩容検知装置、歩行能力改善システム及び装着式歩容検知システム)
【請求項1】
装着者が左右一対の靴を装着した状態で歩容を検知する装着式歩容検知装置において、前記各靴の内側底部に取り付けられ、前記装着者の足の裏面の荷重を測定する荷重測定部と、前記各靴の所定位置に搭載され、前記足の移動時における加速度及び角速度のいずれか一方または両方を検出する足動作検出部と、前記荷重測定部により測定された各荷重の変化に基づいて、前記各足の重心位置を算出する重心位置算出部と、前記足動作検出部により検出された各加速度及び/又は各角速度に基づいて、前記各足の移動軌跡を算出する移動軌跡算出部と、算出された前記各足の重心位置及び移動軌跡とに基づいて、当該各足の重心変動の特異性に応じた脳への発現症状を認識する発現症状認識部と、前記発現症状認識部の認識結果に基づいて、前記装着者への感覚としてフィードバック伝達させる感覚出力部とを備えることを特徴とする装着式歩容検知装置。

再公表2018/066151(歩行障害支援装置及び歩行障害支援方法)
【請求項1】
装着者の左右いずれかの脚の大腿部と下腿部とに装着されるフレーム同士を、当該装着者の膝関節に対応する回転軸を中心に相対的に駆動する駆動部と、前記装着者の左右の足裏面に取り付けられ、当該各足裏面の前足部に加わる荷重を測定する足荷重測定部と、前記足荷重測定部により測定された荷重のピーク値の発生タイミングのうち、前記駆動部の装着側の脚についての発生タイミングを歩行周期として算出する歩行周期算出部と、前記歩行周期算出部により算出された歩行周期と直前の歩行に対する歩行周期の減少率との相関関係に基づいて、前記装着者の運動症状に伴う歩行障害の発現予兆を検出する発現予兆検出部と、前記発現予兆検出部により前記歩行障害の発現予兆が検出された場合、前記装着者の膝関節に対して前記駆動部がアシスト動力を付与するように当該駆動部を制御する一方、前記歩行障害の発現予兆が検出されない場合、前記駆動部による駆動トルクが前記装着者の歩行動作を阻害しないように当該駆動部を制御する制御部とを備えることを特徴とする歩行障害支援装置。

本記事はアフィリエイトプログラムによる収益を得ている場合があります