




























Preferred Robotics、JR東日本と鉄道インフラの維持管理ロボットを開発
PR TIMES
プリファードロボティクス
~技術の「深化と進化」による安全安定輸送の更なる向上~

1. 背景・目的
これまで鉄道の安全・安定輸送の確保のため、維持管理業務には多くの労力がかけられてきました。特に、大雨や地震の発生時は、係員が線路沿線を徒歩などで巡回し路盤の崩壊や線路内への土砂流入など、列車の運行に支障を及ぼす事象が発生していないかを目視で確認していました。こうした作業には二次被害のおそれがあるほか、近年では熊の出没増加による係員の安全確保も課題となっています。当社とJR東日本では、こうした状況に対応するため、「事務所内などの離れた場所にいながらできる」点検手法の確立に向けてロボットなどの遠隔操作、制御に関する研究開発に取り組んでいます。
ロボットx AIで目指すインフラ維持管理の将来像のイメージ
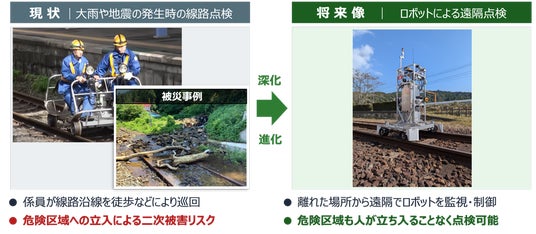
※写真は開発中のものであり、実用化時には変更になる場合があります。
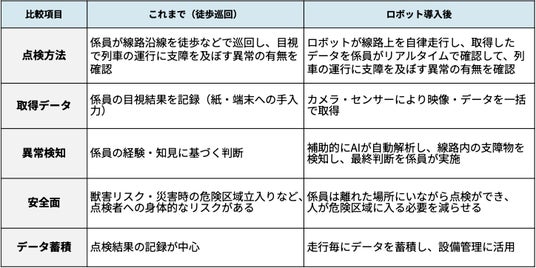
【点検作業の比較】
2. 開発概要
当社とJR東日本は、2024年4月より開発を開始し、概念実証(POC)を2段階にわたって実施し、八高線など計6線区で実証実験を行ってきました。今回開発しているロボットは、鉄道の線路上を自律走行し、搭載したカメラ・各種センサー(LiDAR:レーザーで周囲との距離を測るセンサー、GNSS:衛星を利用して位置を把握する仕組み)から得られる情報を基に安全に走行します(線路内自律走行)。走行中に取得した映像や各種データは機体内に保存するとともにリアルタイムで係員へ送信されます。AI は線路周辺の支障物の検知を補助し、列車の運行に支障を及ぼす異常の有無は、事務所内など離れた場所にいる係員が最終的に判断します。

プロトタイプ機体の外観
実証実験における支障物の検知状況
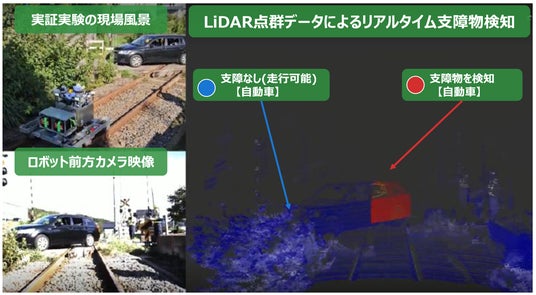
左上写真:障害物検知試験の状況、左下写真:ロボット搭載カメラの映像右画面:ロボット搭載LiDARの取得データ。進路上にある物体を支障物(赤色表示)として認識
走行の様子(動画 ※前モデルのプロトタイプ)
3. 今後の予定
今後も、実用化に向けた開発を継続し、在来線を中心に様々な路線で走行試験を行う予定であり、テクノロジーの力で現場の環境改善やインフラ維持管理の高度化に貢献してまいります。
■ 株式会社Preferred Roboticsについて
設立:2021年11月1日
所在地:東京都千代田区大手町1-6-1 大手町ビル
代表者:代表取締役CEO 礒部 達
資本業務提携先: アマノ株式会社、旭化成ホームズ株式会社、株式会社三井住友銀行
コーポレートサイト:https://www.pfrobotics.jp/
プリファードロボティクスは、株式会社Preferred Networks(PFN)の子会社として2021年11月に設立された、日本のロボットメーカーです。PFNが強みを持つAI技術を最大限に活用し、人の役に立つロボットの提供を目指しています。アマノと共同開発した業務用の小型床洗浄ロボット「HAPiiBOT」(2022年10月発売)に続き、自社開発の家庭用自律搬送ロボット「カチャカ」を2023年5月に、法人向けに特化した「カチャカプロ」を2024年2月に発売しました。富士経済が発行した市場調査レポート「2026年版 国内自律走行ロボット市場分析」において、AMR(自律走行ロボット)国内市場におけるメーカーシェア1位を獲得しています。
【関連情報】高度なAI自律移動技術を、貴社の現場にも
今回のプロジェクトにも活かされている当社のAI・ロボティクス技術は、小型AMR「カチャカプロ」や、新型100kg可搬のAMR「カチャカEvo」のコア技術として、製造業やヘルスケアなど多くの現場で活躍しています。現場の搬送自動化にご関心のある方は、ぜひ製品資料も合わせてご覧ください。
カチャカプロの資料請求はこちらから
カチャカEvoの詳細はこちらから
【新規事業・共同開発のご相談】
また、今回のような当社の技術を活用した共同開発に関するご相談も随時承っております。
特定の課題解決に向けたロボット開発や、自律移動技術の導入にご興味をお持ちの方は、下記フォームよりお気軽にお問い合わせください。
お問い合わせはこちらから
プロトタイプ機体の外観
実証実験における支障物の検知状況
左上写真:障害物検知試験の状況、左下写真:ロボット搭載カメラの映像右画面:ロボット搭載LiDARの取得データ。進路上にある物体を支障物(赤色表示)として認識
走行の様子(動画 ※前モデルのプロトタイプ)
3. 今後の予定
今後も、実用化に向けた開発を継続し、在来線を中心に様々な路線で走行試験を行う予定であり、テクノロジーの力で現場の環境改善やインフラ維持管理の高度化に貢献してまいります。
■ 株式会社Preferred Roboticsについて
設立:2021年11月1日
所在地:東京都千代田区大手町1-6-1 大手町ビル
代表者:代表取締役CEO 礒部 達
資本業務提携先: アマノ株式会社、旭化成ホームズ株式会社、株式会社三井住友銀行
コーポレートサイト:https://www.pfrobotics.jp/
プリファードロボティクスは、株式会社Preferred Networks(PFN)の子会社として2021年11月に設立された、日本のロボットメーカーです。PFNが強みを持つAI技術を最大限に活用し、人の役に立つロボットの提供を目指しています。アマノと共同開発した業務用の小型床洗浄ロボット「HAPiiBOT」(2022年10月発売)に続き、自社開発の家庭用自律搬送ロボット「カチャカ」を2023年5月に、法人向けに特化した「カチャカプロ」を2024年2月に発売しました。富士経済が発行した市場調査レポート「2026年版 国内自律走行ロボット市場分析」において、AMR(自律走行ロボット)国内市場におけるメーカーシェア1位を獲得しています。
【関連情報】高度なAI自律移動技術を、貴社の現場にも
今回のプロジェクトにも活かされている当社のAI・ロボティクス技術は、小型AMR「カチャカプロ」や、新型100kg可搬のAMR「カチャカEvo」のコア技術として、製造業やヘルスケアなど多くの現場で活躍しています。現場の搬送自動化にご関心のある方は、ぜひ製品資料も合わせてご覧ください。
カチャカプロの資料請求はこちらから
カチャカEvoの詳細はこちらから
【新規事業・共同開発のご相談】
また、今回のような当社の技術を活用した共同開発に関するご相談も随時承っております。
特定の課題解決に向けたロボット開発や、自律移動技術の導入にご興味をお持ちの方は、下記フォームよりお気軽にお問い合わせください。
お問い合わせはこちらから
本記事はアフィリエイトプログラムによる収益を得ている場合があります