

撮影:荻原楽太郎
昨年12月掲載の「多脚型のウェアラブルロボットを作った」で、現在制作中のウェアラブルロボット「脚METCALF(メカフ)」設計時に考えていることを書き記した。
今回はその続きである、組み立て作業について書いていく。
アルミに黒アルマイト処理を施す
前回設計したCADデータを工場に送り、アルミの板金パーツを製造してもらった。
いつも海内工業さんに製造をお願いしている。
特急料金でいつもお願いしてしまっているので、いつか余裕のある納期で頼みたい……。

海内工業さんから届いたパーツ
今回は黒アルマイト処理をお願いした。
黒アルマイト処理をすると、アルミの銀色の肌がマットな黒色になる。
アルマイト処理とは、ざっくり言うと、アルミを電解液に浸して電気を流して、アルミの表面を酸化させる処理である。
アルマイト処理をすると、自然の状態で酸化する膜よりも厚い膜ができるので、耐腐食性や耐摩耗性が上がり、アルミを工業製品で使う上での欠点を補うことができる。
その際、アルマイト処理で生まれる孔に染料を浸透させることで色を乗せることができる。
今回の黒アルマイトは、黒い染料を浸透させているというわけだ。
筆者は最近制作した作品で黒アルマイト処理を採用していることが多い。
デザイン的にアルミを黒マットにしたい作品が多いというのはあるのだが、アルマイト処理をすることで、アルミの触り心地が上がり、ウェアラブルロボットを装着する際の安心感につながると考えている。
アルミの銀色の肌そのままを採用した方が「みんなの考えるロボットらしさ」の印象を引き出せる場合もあるので、作品によってアルマイト処理をするか、しないかを考えている。
今のところ黒アルマイトしかしたことがないので、また別の作品では他の色にも挑戦してみたい。
アルミとの組み合わせに「マットアクリル」を初採用
いつも筆者はアルミとアクリルの組み合わせで制作をしている。
フルアルミで作ってしまうと重くなってしまい、装着したときの負荷につながってしまうからだ。
そこで、構造を支える箇所にはアルミを使い、荷重の掛からない箇所や装飾的な箇所にはアクリルを使用している。

アルミとアクリルを組み合わせている
今回は、初めてマットアクリルを採用した。
前回の作品「仮想重機METCALF」で通常の黒アクリルを使用したのだが、つるっとした黒のアクリルは指紋が付きやすく、質感が下がってしまったり、レーザーでカットした際のもりっとした部分(切削で言うバリのようなもの)が目立ってしまったりした。
マットアクリルを採用することでそれらを解消できるのではないかと考えたのだ。
実際マットアクリルを使ってみると、遠目ではアクリルと黒アルマイトアルミの区別がつかないほど質感が似ていて、かなりいいチョイスだった。

この中にアクリルとアルミが混ざっているのがわかるだろうか?
実際、目で見ている限り、よく見ないと区別はつかず、触ったり持ったりして初めてわかるくらい、両者の質感は似ている。
かなり良いアイデアだった。
ただ、異素材を組み合わせる良さを引き出すことができないので作品に合わせて採用するべきだろう。
ICOMAさんのガレージで組み立てていく

組み立てていく
今回、ICOMAさんのガレージを制作場所としてお借りした。
ICOMAさんは、たたんでコンパクトになる「タタメルバイク」を制作しているハードウェアスタートアップだ。
スタートアップならではの部室のような雰囲気がとても居心地の良いガレージだった。
組み立てていくうちに、段々と作品の全貌が見えてくる。
今回、柄をプリントしないぶん、シルエットにこだわって設計したので、素敵なシルエットが見えてくるとわくわくする。
基本的に、ウェアラブルロボットを設計するときはシルエットを最重要視している。
今回は、人間で言う膝にあたる箇所のシルエット設計にこだわった。
こういったプロダクトデザインよりのものは、パソコンだけでは設計するのが難しい。
やはり手書きで描いて、それをパソコン上でなぞってデザインすると、良いシルエットが生まれてくる。

シルエットが見えてきた
サーボモーターを組み込んでいく。
前回の記事で書いたように、フタバのS.BUS通信対応のサーボを使う。
前作でも同じサーボを使ったのだが、実はそこで、サーボがフレームから外れてしまうという事件が起こっていた。
このサーボには、サーボをフレームに固定するためのパーツが付属しているのだが、それを使ってサーボを固定したら、取れてしまったのだ。
うーん、使い方が悪いのかなあ……。
付属部品にはゴムとハトメがあり、ゴムで衝撃を吸収しながらサーボを固定できるようになっている。
どうやら、ハトメパーツがサーボの穴から取れてしまうようだ。

今回使用するサーボたち

付属の部品では、このようにサーボを固定する。
このサーボには切り欠きのある穴がある。
そこで今回、3Dプリンターで作ったパーツを切り欠きのある穴に嵌め込むことで、切り欠きをなくし、さらに穴の径をM3にちょうどよくすることにした。
ドーナツ状のパーツを3Dプリンターでプリントし、穴に嵌め込んでいく。
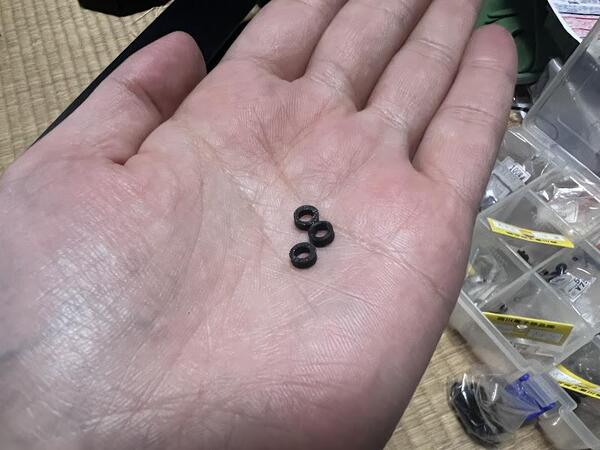
3Dプリンターで出力した

サーボの穴に嵌め込んだ
これが功を奏したようで、安定してサーボをフレームに固定できた。
しかし、この作戦だとゴムを取り除いてしまっているため、衝撃を吸収することができない。
もし参考にされる場合は留意されたい。
【小事件】「回せないネジ」が入っていた
そういえば、ちょっと面白い事件が起きた。
サーボにはプラスチックのサーボホーンが付属している。
丈夫にしたくて、別売のアルミサーボホーンを購入した。
アルミサーボホーンにはそれを固定する用のネジが付属しているのだが……4つ購入したうちの1つだけ、ネジの六角を入れる穴が存在しなかった!
なかなかこんなことはないのでちょっと面白い。
返品交換をお願いする時間はなかったので、別の手持ちのネジを使用して場を凌いだ。

穴がなくて回せないネジ
完成したら、いざ撮影!
片脚が完成した!
かわいくなりそうな気がする!

片脚完成
本記事はアフィリエイトプログラムによる収益を得ている場合があります
この連載の記事
- 第346回 「そこそこ稼ぐおじさん」でいいのか? 迷ったあなたへ
- 第345回 順調なのに不安 その違和感、実は“次のサイン”です
- 第343回 メディアアート再燃?「TOKYO PROTOTYPE」に人が殺到した理由
- 第342回 休職中の同僚を「ずるい」と思ってしまうあなたへ
- 第341回 3Dモデルを必死にリギングした結果、「AIが優秀すぎる」ことに気づいた
- 第340回 VRChatでロボットになりたい筆者、最終的にBlenderを選んだ理由
- 第339回 復職が不安なあなたへ。“戻らない復職”を私が選んだ理由
- 第338回 DJをやってみようと思い立った
- 第337回 「子どもを預けて働く罪悪感が消えない」働く母親の悩みに答えます
- 第336回 ChatGPT、Gemini、Claude──特徴が異なるAI、どう使い分ける?
- この連載の一覧へ
























