
筆者は今まで、ウェアラブルアームロボットを制作してきた。
アームロボットが肩から生えているような作品だ。
肩から生える形なのは、リュックのように装着することで、人々に、慣れ親しんだものに近い形で装着して欲しかったからだ。
肩以外に装着するウェアラブルロボットはずっと制作したかった。
なかなか、いつも作っているものではないものを作るのは心理的ハードルが高く、だらだらと先延ばしにしてしまった。
しかし、今年の制作テーマを「気楽に作る」に据えたことで、なんだか肩以外に装着するウェアラブルロボットも作れるような気がしてきた。
ずっと、人が多脚になれるようなウェアラブルロボットを作りたいと思っていた。
今回は、それに挑戦することにした。この記事では、デザイン・設計に至るまでの思考を書き残していく。
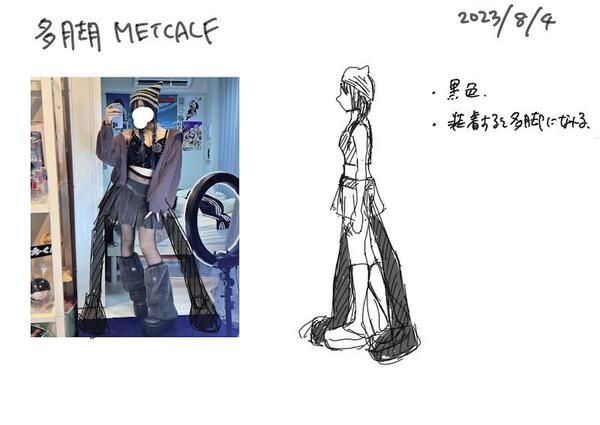
シルエットイメージ
スカートから脚を出すのが難しい
普段、肩にリュックのように背負っているので、ロボットの重さを自然に装着できるが、脚を装着しようとすると、腰に重さをかけなくてはならない。
そして、スカートから多脚の脚が出てきてほしいので、なるべくスリムな形で装着できるようにしたい。
腰の周りをでっぷりさせたくない。
最初、腰の周りにアルミの大きな円を用意して、円を腰に固定することで装着しようと考えていた。
ここで悩みが発生する。
スカートより大きな円にならざるを得ないので、スカートから多脚の脚を出すのが難しいのだ。
腰の周りの大きな円
とすると、ベルトなどで腰にロボット脚そのものを装着させるか……?
しかし、今までの経験上、ベルトで装着するのは重さでずれてしまい、理想のシルエットを保つのが難しい。
あと、腰の周りに大きなアルミがあるのってかわいいのでは?
スカートからロボット脚を出したい気持ちと、腰の周りにアルミでボリュームを出したい気持ちの拮抗……。
スカートから脚が出ているだけだと、ウェアラブル感が低くなってしまうのも考えられる。
そもそも、スカートの中に入れたいパーツと、スカートの外に出したいパーツが混在しすぎている。
「円はスカートの外に出したいけど、腰に縁を留めるベルトはスカートの中に隠したい」
「円はスカートの外に出したいけど、ロボット脚の根本はスカートの中に隠したい」
この辺のコンセプトを整えていかなくてはならない。
リングに引っかけて多脚を固定すればいいのでは?
ここで再度、今年の夏に描いたイメージデザイン画を見てみる。
夏に描いたデザイン画
スカートの中からロボット脚が出ている必要性、もしかして無いのでは……?
スカートからロボット脚を出すよりも、スカートの外にロボット脚があるほうが、シルエットをでっぷり可愛くできる気がしてきた。
てか、夏にデザイン画描いたのに冬まで進捗がないのやべえ。
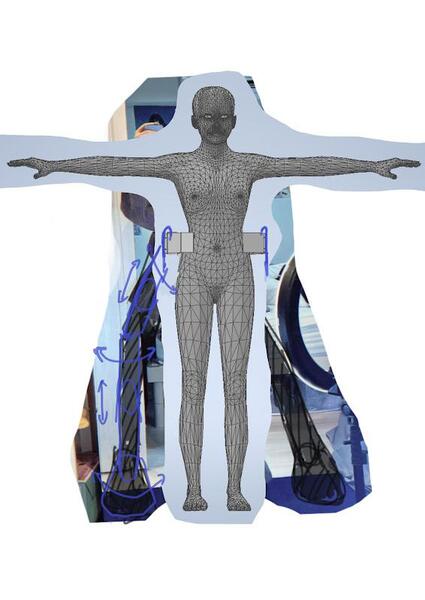
ということで、「腰にでかい円があり、そこからロボット脚が生えている」という構造にすることにした。
円とロボット脚は解体できる仕様にしたい。
円を装着してからロボット脚を取り付ける方がモデルさんに負担がなさそうだし、持ち運びも楽そうだ。
そこで、円に引っ掛けてロボット脚を固定することにした。
2箇所で引っ掛ければ固定はできるだろう。
脚の固定方法と動かし方を考えていく
ロボット脚、今までのアームと大きく違うのは、人の身長や体型に大きく依存するところだ。
腰周りの円のサイズ選定も難しいし、ロボット脚の長さの選定も難しい。
ロボット脚は床に着地しててほしいし。
そこで、サイズ調整の自由が効く設計にすることにした。長穴にねじ止めすることによって、サイズを調整できる。
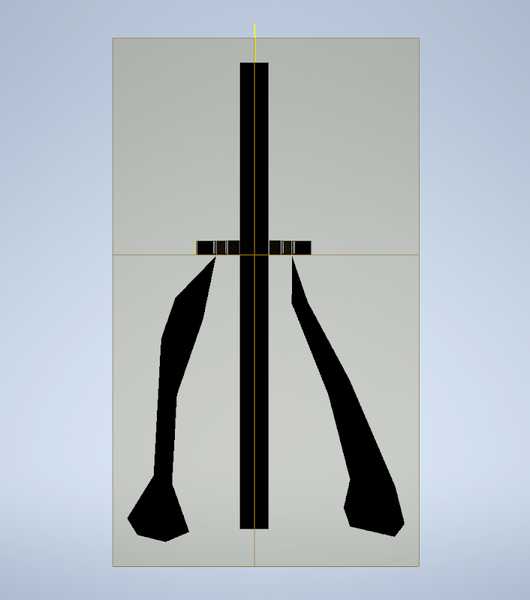
イメージスケッチ
ロボット脚の動きについても考えたい。
脚の先っぽ、つまり下部については、歩いているような動きにしようと思う。
真ん中あたりにも、膝を曲げているような動きを与えたい。
根本、つまり上部については、動かさなくてもいいのではないかと思う。
上部を動かしてしまうと、美しいシルエットを保つのが難しいし、どたばたした印象になる。
このように考え、関節は1脚あたり2つにすることにした。
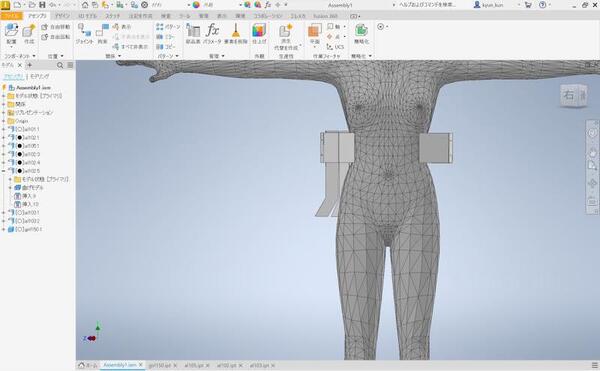
CADソフトで実際に設計へ
本記事はアフィリエイトプログラムによる収益を得ている場合があります
この連載の記事
- 第349回 生成AIなんでも展示会、想像以上に“なんでも”だった ホラーもぬいもロボも登場
- 第348回 動画の字幕つけ、こんなに楽になってたのか Adobe Premiere Proの自動文字起こしに今さら驚いた
- 第347回 AIで作った曲でDJした結果… 意外な壁があった
- 第346回 「そこそこ稼ぐおじさん」でいいのか? 迷ったあなたへ
- 第345回 順調なのに不安 その違和感、実は“次のサイン”です
- 第343回 メディアアート再燃?「TOKYO PROTOTYPE」に人が殺到した理由
- 第342回 休職中の同僚を「ずるい」と思ってしまうあなたへ
- 第341回 3Dモデルを必死にリギングした結果、「AIが優秀すぎる」ことに気づいた
- 第340回 VRChatでロボットになりたい筆者、最終的にBlenderを選んだ理由
- 第339回 復職が不安なあなたへ。“戻らない復職”を私が選んだ理由
- この連載の一覧へ
























