




無駄に性能が高すぎて爆熱
なのに割り込み処理は8bit MCUより遅い
さて、問題はこれに先立って発表され、2013年11月からリリースされたQuarkと、これを搭載したGalileoである。

上が初代Galileoボード、下が第2世代(2014年8月発表)である
Quark SoCは400MHz駆動のCPUコアに512KBのSRAMとDDR3のメモリーコントローラー、PCIe、それといくつかの周辺機器を搭載した構成となる。
MCUならここにADC/DAC/コンパレーター/オペアンプ/タイマー/PWMなどが搭載されることになる。逆にUSBやイーサネットはともかくPCIeが入るのは変だし、割り込みがAPICというのもけっこう面倒くさい
メモリーも内蔵しているので一応MCU(Micro Controller Unit)という分類にできなくもないのだが、実際にはメモリーマッピングの管理がMPU(Memory Protection Unit)ではなく仮想記憶に対応したMMU(Memory Management Unit)で、このためMMUに非対応なRTOS(Realtime OS)などはそのままでは動かないというあたりは、分類的にはMPU(Micro Processor Unit)に該当する。
実際にDebianやYocto Linuxなどが動作しており、軽量なIoT向けOSを利用しようとすると、わりと使いにくいことになった。実際Quark SoCを搭載したGalileoボードではArduino互換のコードを実行できるのだが、Arduino Uno向けのLチカのコードが1KBだったのに対し、これをGalileo向けにビルドすると48KBにも膨れ上がった。
Galileoでは、まずLinuxカーネルが動作し、その上で仮想的にArduinoのSketchをサポートするクライアントが動くという構造だったので、そもそも効率が悪い。
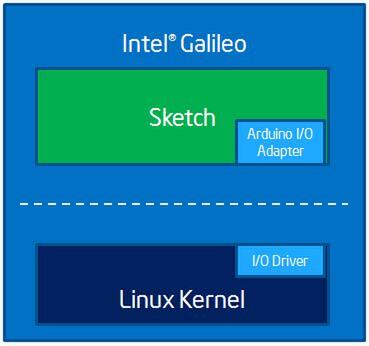
当時のProduct Briefより抜粋。Linuxカーネルが動作し、その上で仮想的にArduinoのSketchをサポートするクライアントが動く構造なので、I/Oが遅いわけである
さてこのQuarkのCPUコアであるが、実はP54Cである。つまり第2世代のPentiumコアである。インテルとしては、P54コアは非常に使い勝手が良かったようで、前回のGNAの制御もそうだし、古いところではLarrabeeがやはりP54Cコアベースで構築されている。他にも研究用などでP54Cコアは多く使われている。ただ、MCUとして見た時には以下の欠点がある。
- 無駄に性能が高すぎる
- 割り込み応答性が悪い
なんというか、テクニカルコースに出るレース車にドラッグレース用エンジンを積むようなものだ。実際普通(?)のArduinoは動作中にチップを触ってもほんのり温度が高いかな? という程度だが、Quarkは公称消費電力2.2Wにも関わらず、触れないくらい熱くなる。
パッシブヒートシンクくらいでは連続運用には厳しく、アクティブファンが必要な温度で、こうなると組み込み用途ではいろいろ制限が出てくるし、消費電力も多い。そのくせインオーダーながらスーパースカラーのプロセッサーなので、割り込み処理は8bit MCUより遅い。したがって、消費電力を下げるために動作周波数を下げると、割り込み処理がさらに遅くなるという不都合がある。これでIoT機器を作れ、と言うのはなかなかしんどいものがある。
ちなみにQuarkの派生型で、Silver ButteやMint Valleyといったコード名の製品(製品名はQuark D1000/D2000)もあり、こちらは32MHzまで動作周波数を落とした代わりに消費電力は25mWと超ローパワーになったが、同じ動作周波数の8bit MCUより遅かったため、やはり採用例を聞いたことがない。
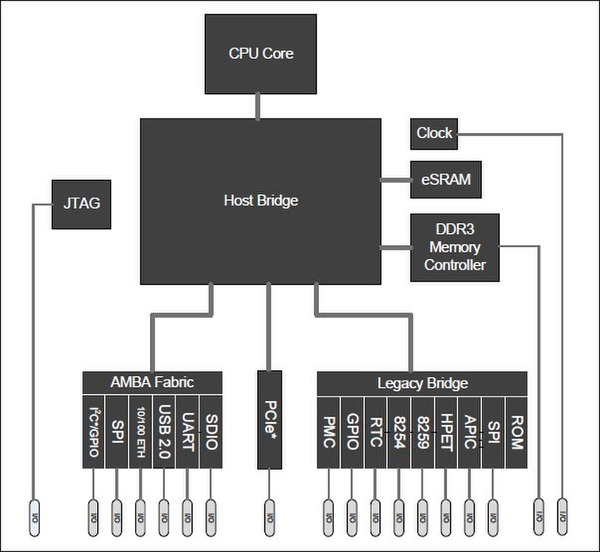
それでも会社のトップがぶち上げた以上、やるしかない。初代Galileoボードは、それはそれはひどいものだった。下の画像がGalileoボードの構成図である。

Quarkの周辺にあるADCやGPIO PWMが問題のもの
なぜMCUにPCIeバスが要るんだ? という突っ込みはヤボかもしれないが、それよりも大問題なのはアナログ入出力やPWM出力といった、MCUではごく当たり前に利用される周辺回路がQuarkには統合されていないことだ。
ではどうするか? まずアナログ出力は切り捨てた(!)。この段階でちょっと待てと思うのだが、アナログ入力については外付けになったADCをSPI経由でつなぎ、PWMはやはり外付けのPWMコントローラーをGPIOでつなぐという、おそろしく効率の悪い(そして原価コストが跳ね上がる)方法で実装した。
この結果として、例えばアナログデータのサンプリング速度は、20MHz駆動のATmega328を搭載したArduino Unoの数十分の1というケースもあった。これはもう、根本的にMCUとして使うことを考えていないとしか言いようがない構成だった。
本記事はアフィリエイトプログラムによる収益を得ている場合があります
この連載の記事
-
第868回
PC
物理IPには真似できない4%の差はどこから生まれるか? RTL実装が解き放つDimensity 9500の真価 -
第867回
PC
計算が速いだけじゃない! 自分で電圧を操って実力を出し切る賢すぎるAIチップ「Spyre」がAI処理を25%も速くする -
第866回
PC
NVIDIAを射程に捉えた韓国の雄rebellionsの怪物AIチップ「REBEL-Quad」 -
第865回
PC
1400WのモンスターGPU「Instinct MI350」の正体、AMDが選んだ効率を捨ててでも1.9倍の性能向上を獲る戦略 -
第864回
PC
なぜAMDはチップレットで勝利したのか? 2万ドルのウェハーから逆算する経済的合理性 -
第863回
PC
銅配線はなぜ限界なのか? ルテニウムへの移行で変わる半導体製造の常識と課題 -
第862回
PC
「ビル100階建て相当」の超難工事! DRAM微細化が限界を超え前人未到の垂直化へ突入 -
第861回
PC
INT4量子化+高度な電圧管理で消費電力60%削減かつ90%性能アップ! Snapdragon X2 Eliteの最先端技術を解説 -
第860回
PC
NVIDIAのVeraとRubinはPCIe Gen6対応、176スレッドの新アーキテクチャー搭載! 最高クラスの性能でAI開発を革新 -
第859回
デジタル
組み込み向けのAMD Ryzen AI Embedded P100シリーズはZen 5を最大6コア搭載で、最大50TOPSのNPU性能を実現 -
第858回
デジタル
CES 2026で実機を披露! AMDが発表した最先端AIラックHeliosの最新仕様を独自解説 - この連載の一覧へ



























で240Hz&0.03msという欲張り4Kゲーミングディスプレーが至高の逸品すぎた")






























