




























国内初!SKYDIO X10+3DSCANによる自動航行での橋梁床板部の詳細オルソ画像撮影により、0.1mmのクラック撮影の検証を実施しました
株式会社ジャパン・インフラ・ウェイマーク
GPS が入りにくい橋梁下部において自動航行による損傷状況の点検・解析を実施!
株式会社ジャパン・インフラ・ウェイマーク(本社:東京都港区、代表取締役社長:矢倉 良太)と、八千代エンジニヤリング株式会社(本店:東京都台東区、代表取締役社長執行役員:高橋 努 以下八千代エンジニヤリング)は、Skydio合同会社(東京都港区、日本代表:柿島 英和)の協力のもと、2024年6月17 日に多摩市の橋梁において、Skydio社のエンタープライズ向けAI 搭載自律飛行型最新式ドローン「Skydio X10(以下、X10)」を使用したGPSが入りにくい橋梁下部における自動航行での床板部のオルソ画像(※1)用の写真撮影およびオルソ画像による損傷状況の調査、解析を実施しました。
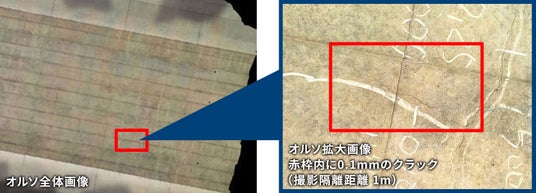
X10 の自動航行撮影によって 0.1mm のクラックを判別できる精度での床版部のオルソ画像の撮影は国内で初めてのこととなります。
※1 オルソ画像:写真上の像の位置ズレをなくし空中写真を地図と同じく、真上から見たような傾きのない、正しい大きさと位
置に表示される画像に変換したもの。
(出典:国土交通省国土地理院 https://www.gsi.go.jp/gazochosa/gazochosa40002.html )
背景と目的
従来のSkydio 社ドローン SKYDIO S2+では、0.1mmのクラックを撮影するためには、構造物に対し約50cmまで接近しないと撮影できなかったため、手動飛行で撮影する必要がありました。
そのため、オルソ画像作成用の撮影を行う際には、パイロットの操縦スキルにより、撮影写真品質への影響が出やすく、撮影後のオルソ画像処理時において、想定していた品質を再現度高く確保することが難しいという問題が発生していました。

構造物に対する接近撮影の状況
撮影写真品質への影響が出やすいパイロットの操縦スキル
今回、X10の高性能カメラおよび、SKYDIO 3DSCAN(※2)の2DCapture 機能(※3)を利用し、橋梁の下でのGPSが入りにくい環境において、隔離距離、ラップ率、範囲などをアプリ上で設定の上、自動航行により撮影を実施することで、1m以上隔離による自動飛行の安全性向上、パイロットの操縦スキルに依存しないオルソ画像作成に必要なラップ率を確実に満たす撮影の品質と再現性の向上、撮影時間の短縮による生産性の向上を実現することに成功しました。
※2 Skydio 3D Scan:構造物を認識し、自動的・自律的に撮影しながら飛行することができる飛行支援ソフトウェア
※3 2DCapture:Skydio 3D SCANの機能の1つで、オルソ画像等を作成するための平面スキャン機能
実施内容
多摩市の管理する橋梁において、X10+SKYDIO 3DSCANの2DCapture機能を用いて、対象となる構造物(中空床版橋底面)に対し、カメラを真上向きにした状態で、ラップ率(縦方向、横方向)、構造物までの隔離距離をアプリ上で設定し、自動航行による連続写真の撮影を行いました。また、自動航行においては、構造物に対し、1方向だけでなく、クロス方向にも自動で写真撮影が実施できる設定を使用しました。
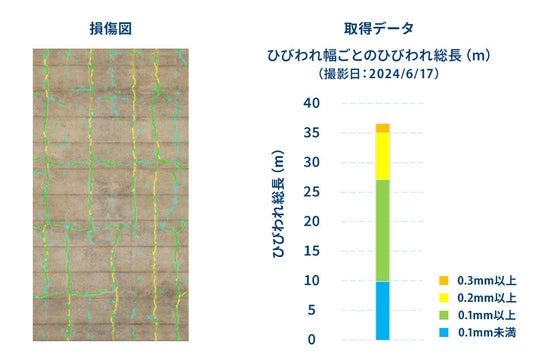
撮影後、まずは弊社保有の複数社のSfm解析ソフトを用いて、3次元データ化およびオルソ画像の作成を行いました。 次に、そのオルソ画像を八千代エンジニヤリング社が AI 処理し、損傷の図化、ひび割れ幅の検出を実施し、0.1mm 未満のひび割れも検出できることを確認しました。

自動航行により連続写真の撮影を行うX10
【使用機材】
● SKYDIO X10 VT300-L(広角カメラ)
- センサー Sony IMX989 1" 50.3MP CMOS
- 写真サイズ 8192×6144(約5000万画素)
● SKYDIO 3DSCAN
- 2D Capture(ラップ率設定、対象物までの隔離距離設定、ジオフェンス設定)
● (株)ニコン・トリンブル SightFusion for Desktop
X10にて撮影した画像
また、従来の手動飛行時と比較して、 以下の事項が確認できました。
- アプリで撮影条件を設定した後は、自動で撮影できるため、ラップ率、撮影画角、方向を確認しながらの撮影が不必要となり、作業効率化と再現性の向上を確認
- 同じ対象物を、時間を変えて撮影した写真でオルソ画像処理を行った結果、ほぼ同等のオルソ画像の作成を確認
- 1m程度隔離距離を取れることによる自動航行による安全性向上を確認
- 0.1mm以下のひび割れも含めたデータ取得を確認
今回は、X10 VT300-L(広角カメラ)を用いて、点検業務を実施しました。今後はX10の各種カメラを、対象物の状況や周辺環境に応じた最適な活用方法について検証を行い、新技術を活用した点検に必要なデータをより効率的に、品質よく取得できる技術を確立させ、X10の現場でのさらなる活用方法を検討していきます。また、このような技術を活用しながら構造物の維持管理における効率化・高度化を推進してまいります。
当社(ジャパン・インフラ・ウェイマーク)について
インフラ維持管理という社会課題を解決するため、当社は2019年4月に発足いたしました。以降、「新たなインフラ点検手法を創造し、携わるすべての人が使えるようになること」をビジョンにかかげ、NTTグループで培ったメンテナンス技術とICT/AI、ドローン技術をかけあわせ、お客様のニーズにあったインフラ点検、インフラ維持管理サービスを提供しております。
社 名:株式会社ジャパン・インフラ・ウェイマーク
所在地:東京都港区六本木7丁目10-25 中島ビル
代表者:代表取締役社長 矢倉 良太(やぐら りょうた)
資本金:1億円
設 立:2019年4月1日
URL: https://www.jiw.co.jp/
八千代エンジニヤリングについて
国内トップクラスの総合建設コンサルタントとして、国土交通省を始め官公庁から公共事業を受託し、社会インフラや環境保全に関する技術コンサルティングサービスを、設立より60年以上にわたって提供しています。
近年は、これまで培った技術ノウハウを民間企業へも提供しビジネスの領域を広げています。
社 名:八千代エンジニヤリング株式会社
所在地:東京都台東区浅草橋5-20-8 CSタワー
代表者:代表取締役社長執行役員 高橋 努(たかはし つとむ)
資本金:4億5千万円
設 立:1963年1月29日
URL: https://www.yachiyo-eng.co.jp/
本記事はアフィリエイトプログラムによる収益を得ている場合があります