




IBM Watsonも活用して高機能化へ
課題として挙げたのは「物をホールドするために重要な親指の力をもう少し強くしたい」「洗濯バサミをピタッと掴めるほど繊細な指にしたい」などだ。これらは実証後、高機能モデルとしての製品化を目指すという。
また、利用者が腕を上げているか、下げているかといった姿勢の違いによって、手を握ったときの筋電にも差が出るという。それが誤動作の原因になりかねないため、姿勢に応じたキャリブレーション(調整)が必要なのも課題だ。
姿勢が異なると同じ動作でも筋電が異なるため、キャリブレーションが必要に
現状ではユーザーのそれぞれの動作の筋電を計測し、プログラムに事前登録する必要がある。が、もしも万人に共通するパターンが見つかれば、そうした手間をかけずに、さまざまな姿勢で高精度な識別が可能になるかもしれない。そこで多くの人から筋電データを収集し、共通パターンを分析する取り組みを始めている。
問題は、筋電というニッチなデータをいかに大量に集めるか、だ。そのために開発したのが、体中のどの筋肉にも利用できる「汎用筋電インターフェイス」。筋電計測装置として、ユーザーの筋電信号とメタデータをクラウドにアップロードする。クラウド環境にはIBM SoftLayer/Bluemixを採用。様々な業界で手軽に筋電データを収集できるよう、2016年初旬に製品化する予定という。
メルティンはこれまでにも各地でデモを実施し、そこで多数の人から筋電データを集めてきた。その数、健常者数1000人分と実際の上肢切断者数10人分だ。そうして「こんな姿勢でグーしたときの筋電」といった膨大なデータが、すでにクラウドに蓄積されている。
簡単な共通パターンも見つかっており、そのデータベースとユーザーの姿勢をマッチングするプログラムもすでに開発した。「実際の効果検証はこれからですが、キャリブレーションの課題はほぼ克服できたと考えています」(粕谷氏)という。
今後はさらなる高機能化のために「IBM Watson」も使う予定という。汎用筋電インターフェイスが普及すれば、より膨大なデータが解析にかけられる。そこにWatsonの機械学習を利用すれば、人の目では見つけられないより多くの共通パターンが見つけられる。「手そのもの」な筋電義手がぐっと実現に近づくはずだ。
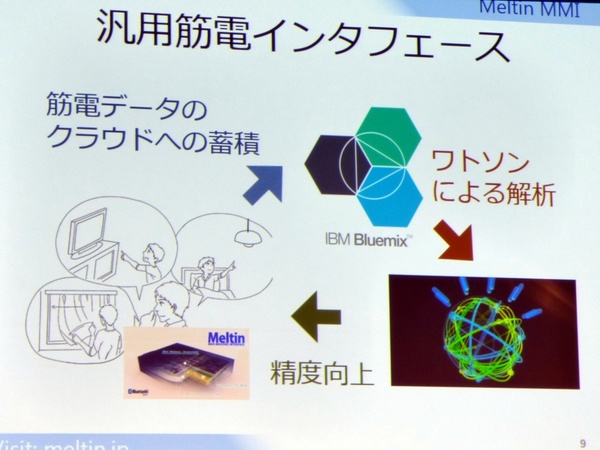
膨大な筋電データからIBM Watsonを使って共通パターンを見つけ出す
Watsonの活躍はもう少し先となりそうだが、今から楽しみな事例である。しかし、メルティンが目指すゴールはさらにその先にある。粕谷氏が見据えるのは「人の手を超えるもの」だ。そこには「攻殻機動隊」もキーワードとして飛び出して――
(→次ページ、人の手を超えるものとは?)
本記事はアフィリエイトプログラムによる収益を得ている場合があります



































ゲーミングディスプレー、200Hz・1ms・昇降式多機能スタンドで3万2980円は断然買いでしょう")
