Forcesteed Robotics、ヒューマノイド現場導入を支援する汎用ヒューマノイドコントローラ「Forcesteed-LEIVOR」開発
株式会社Forcesteed Roboticsは、汎用ヒューマノイドコントローラ「Forcesteed-LEIVOR(レイバー)」を開発したことを発表した。産業用ロボット分野で用いられてきたティーチングによる動作設計に加え、模倣学習および推論処理といったAIロボティクス技術を統合したフレームワークだという。

ヒューマノイド産業向けの汎用ヒューマノイドコントローラ「Forcesteed-LEIVOR」
これにより、ロボットの学習(Learning)・動作生成(Execution)・知的行動(Intelligent Behavior)・実行制御(Operation)を一体的に扱うことができ、従来のロボットSIerが持つ開発ノウハウを活かしながら、ヒューマノイドロボットの導入と運用推進を支援するという。
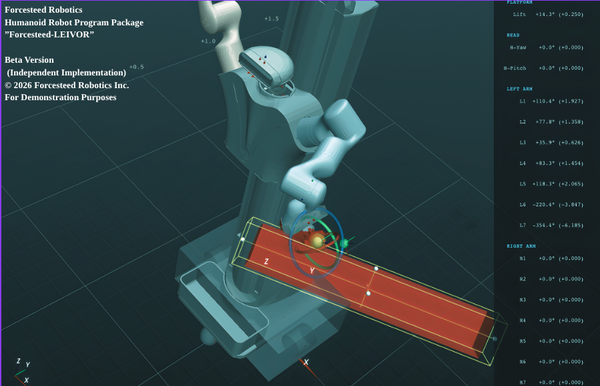
周辺物体との干渉チェック機能
「Forcesteed-LEIVOR」は、特定のヒューマノイド機種専用のソフトウェアではなく、複数のヒューマノイド・セミヒューマノイドに適用展開可能な「汎用ヒューマノイドコントローラ」(従来のプログラミング型+模倣学習型ハイブリッド)として設計されているとのこと。
ロボットの機体ごとに開発環境を分断するのではなく、共通の開発基盤として利用することを目指しているという。現時点では、ugo、RealMan、Unitreeのロボットに対応。今後も対応ロボットを随時拡張予定としている。
「Forcesteed-LEIVOR」では、産業用ロボットや協働ロボットの現場で培われてきたティーチングやプログラム設計の考え方を活かしながら、ヒューマノイド向けの動作設計や業務実装を進められるという。
人の作業データを利用した模倣学習や、状況に応じた推論処理を組み込むことが可能とのこと。ティーチングだけでは対応が難しい環境や、状況が変化する現場業務への適用も視野に入れたロボット運用を可能にすることを目指しているという。VLAモデルを活用したロボット制御と従来のルールベース制御を組み合わせた柔軟な運用が可能になるとしている。
今後、Lerobot VLAモデル対応の増加、画像認識やすでに発表済みのロボットピッキングパッケージとの結合などを計画しているという。

本記事はアフィリエイトプログラムによる収益を得ている場合があります