




東京ロボティクス株式会社
AIと連携したロボットの動作生成の研究や、人型ロボットの産業応用の研究に最適
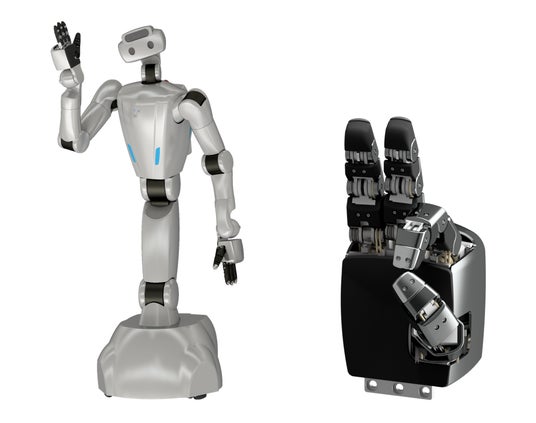
新型Torobo(左)と新型Torobo Hand(右)
最先端ロボット技術を追求する東京ロボティクス株式会社(東京都文京区、代表取締役:坂本義弘)は、研究者向けの力制御可能な全身人型ロボット「Torobo」と多指ハンド「Torobo Hand」の最新バージョンの提供を開始します。
昨今、生成AIによるロボットの動作生成が注目されていますが、AIによって生成されたモーションと現実世界のズレは操作対象物やロボット自体の破壊に繋がります。ToroboおよびTorobo Handは、インピーダンス制御を用いたコンプライアンス特性により、外力の受け流しや、外部拘束への倣い、衝撃の吸収などが可能です。それにより、接触が多い環境下でも安定した動作が可能になります。また、人間と同様のサイズと出力(可搬)を有するため、現場での実作業を想定した研究開発にも最適です。
Toroboの特徴
人間と同様のサイズや可搬重量
・身長1,680mm、本体重量125kg、片腕可搬重量7kg(最悪姿勢時)
人間と同様の動作を行うための軸構成
・腕7軸×2本、腰3軸(下からP-P-Y)、首3軸、全方位移動台車
リアルタイム可変コンプライアンス
・腕や腰の関節インピーダンスや、手先のカルテシアンインピーダンス特性をリアルタイムに調節可能
背部に設けられたDC24V-600W出力ターミナル
・オプションでGPU付のPCを搭載可能
ROS2対応
・ROS2に対応しているため、他社製のハンドやセンサとの連携が容易です
最小限の構成で提供
・研究者の多様なニーズに応えるべく、頭部カメラなし・ハンドなしの最小限の構成で提供いたします。カメラ付頭部や下記Torobo Handはオプションとなります
詳細は以下のパンフレットにてご確認ください。
詳細を見る
<参考デモ>
以下より旧型Toroboのデモを御覧ください。新型でも基本的に同様の機能が実装されますが、軽量になるため、より素早い動きが可能になります。
・
・
・
Torobo Handの特徴
巧みな物体操作を可能にする関節構成
・人差指、中指、薬指がそれぞれ3関節(2駆動軸)、親指が4関節(全て駆動軸)の構成のため、巧みな物体操りが可能です
各関節でインピーダンス制御が可能
・関節に柔軟性を持たせることにより、様々な形状に倣ったり、突き指を防止することができます
交換可能な接触センサ
・指と掌を合わせて20点以上の接触センサ(1軸圧力センサ)が組み込まれていますが、より高度な触覚センシングのために、購入者自らセンサを交換することができます
ROS2対応
・ROS2に対応しているため、他のロボットやセンサと組み合わせることが容易です
詳細は以下のパンフレットでご確認ください。
詳細を見る
<参考デモ>
以下は旧型ハンドのデモとなります。旧型と新型は軸構成や駆動方式、サイズなどが異なりますが(新型はワイヤ駆動でより小型)、「柔軟関節を備えた巧みなハンド」というコンセプトに変わりはありませんので、参考までに以下のデモを御覧ください。
・
・
価格
Toroboの価格は1,800万円(税別)となります(2024年中の発注による初回特別価格、およびオプションなしの価格)。Torobo Handは、Toroboのオプションとしては両手で1,200万円(税別)、単体売りの場合は両手で1,260万円(税別)となります。その他オプションやハンドの片手販売なども行っていますので、詳しくは以下の価格表を御覧ください。
詳細を見る
納品時期
最初の出荷は、Torobo、Torobo Handともに2024年12月頃を見込んでいます。ご興味のある方は以下までお問い合わせください。
contact@robotics.tokyo
本記事はアフィリエイトプログラムによる収益を得ている場合があります











の31.5型ディスプレーはうっとりするほどキレイだった、でもお値段は……")





























で240Hz&0.03msという欲張り4Kゲーミングディスプレーが至高の逸品すぎた")






















