
「ゆずりあうクルマ」AI技術
KDDI総合研究所と北海道大学大学院 情報科学研究科 調和系工学研究室は10月2日、自動運転車両のAI技術に用いる「ゆずりあうクルマ」技術を開発したと発表した。
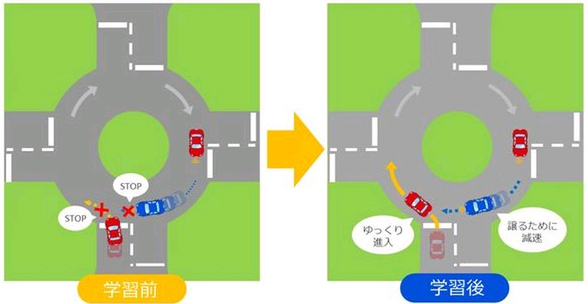
AIが自律的に運転する技術の開発が各所で進められているが、とくに合流などの他の車と関係するようなシーンでは「減速」、「停止」、「周辺を確認しながらの発進」、「合流先の車両への追随」といった複雑な動作が必要とされる。これらの一連の動作をAIに学習させると、合流する車両の追従を改良すれば減速・停止の動作が劣化するという。
これらはAIが学習すべき運転シーンが体系的に整理されていないことが原因であり、運転の学習効率を高めるために運転シーンの抽出と、他車との協調を含めた理想的な運転制御の要件定義を行なうとともに、行動のモジュール化、モジュールごとの深層学習、モジュールをつなぎ合わせるAI技術を開発した。
開発したAIは実車のおよそ12分の1のラジオコントロールカーで実験を行ない、この手法による学習の有用性を確認したという。KDDI総合研究所では、自動運転のためのデータを効率的な収集、北海道大学では運転制御の学習手法の開発とともに、車間AIのコミュニケーションに関する研究を進めるとしている。
本記事はアフィリエイトプログラムによる収益を得ている場合があります









