




義手が驚きの進化を遂げている。
電気通信大学(以下、電通大)発ベンチャーのMeltin MMI(以下、メルティン)が開発する「筋電義手」。「手のような道具」ではなく「手そのもの」を目指したその義手は、手首や指先まで自在に動かせる機能性から、2016年のサイボーグ五輪(サイバスロン)に出場することが決まっている。一方、実際の上肢切断者の適用に向けては、「IBM Watson」による高機能化や、実用化に向けた臨床実験も始まった。
「まるで手があるみたい」上肢切断者も驚くその義手はどのようにして作られたのか。技術によって未来はどう変わるのか。メルティン 取締役執行役員 COOの粕谷昌宏氏に聞く。
メルティンの驚きの筋電義手
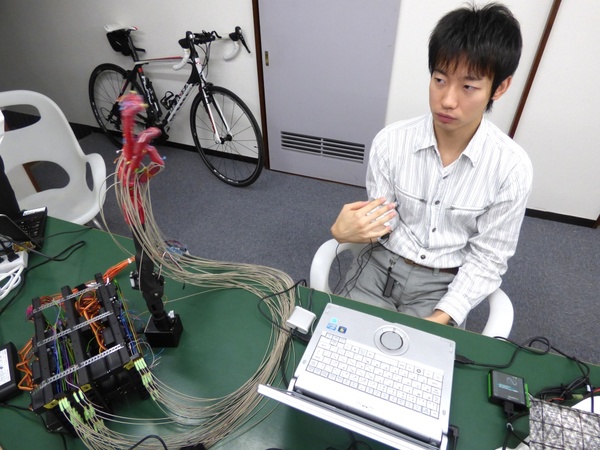
メルティンは、2013年7月に設立された電通大発のベンチャー企業。現在は渋谷区にオフィスを構える。事業内容は「筋電義手やロボットハンド、およびソフトウェアの設計・製造・販売」で、特に「筋電義手」の技術に強みを持つ。
「筋電(きんでん)」は「筋肉を動かすと発生する微弱な電気信号」。それを電極で計測することで、様々なハードウェアの制御信号として利用できる。ただ、従来の筋電計測では、「筋肉に力が入っているか、いないか」、つまり「ON/OFF(あるいは1か0か)」しか判別できないのが課題だった。

力を入れると筋電が発生し、力を抜くと止まる(出典:追坂電子機器)
そのため、「筋電義手は半世紀前からあるにもかかわらず、いまだ1か0かで、手のひらをグーパーさせるくらいの機能しか実現できていません。それ以外の動作が可能だとしても1と0を組み合わせてコマンド化しているだけで、手首を回すだけでも0101のように動かさなければならない。生活するためには必要なパターンをすべて覚えなければダメで、まったく直感的ではなかった。例えば、ドアを開けるだけでも、ドアノブを握る、回す、引く、離すという動作ごとに複雑なコマンド入力が必要となるわけです」と粕谷氏はいう。
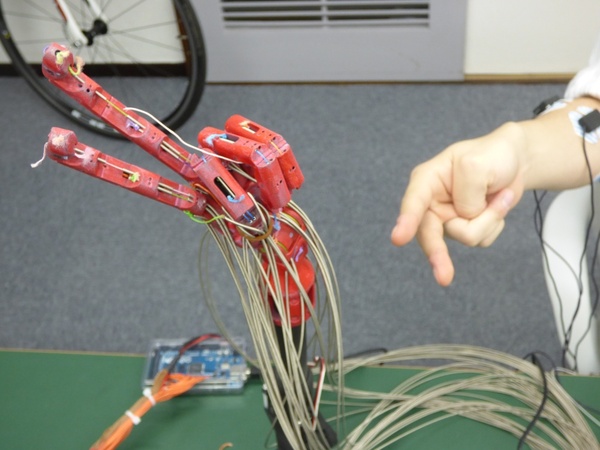
これに対して、同社は「個性適応技術を用いた筋電解析」という独自技術を開発。筋電からパターンを抽出・解析することで、その人が何をしようとしているのか(動作意図)まで判別できるようにした。つまり、筋電の波形から「手首を動かしたい」「人差し指を動かしたい」「親指を動かしたい」というパターン(人の意思)を読み取り、思い通りに義手を動かせる「直感的な操作」を実現したのだ。

電極は3個のみ。同じ機能を実現する場合、他研究機関の技術では8個~10個ほどの電極が必要になることも
直感的な操作を実現
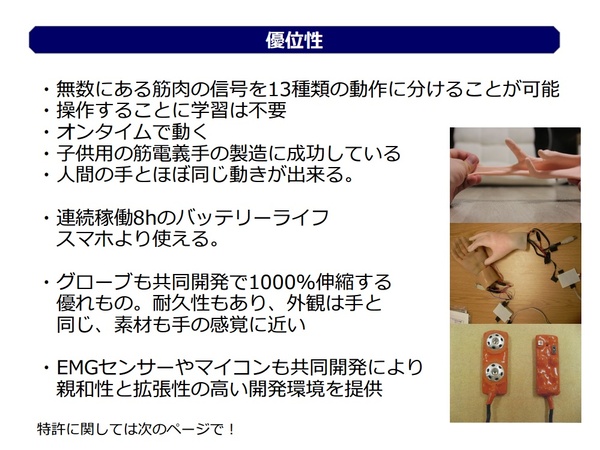
対応するのは、日常作業を可能にする「手首を曲げる(前後)」「手首を回す(左右)」「グー」「パー」「グーパーの間のニュートラルな状態」「親指を曲げる」「小指と薬指を曲げる」「2本指でつまむ」「3本指でつまむ」といった操作。また、独自のワイヤー技術により、自動で丸いもの・四角いものなど物の形状に合った握り方をしてくれるという。その緻密さは、下の動画のように「手話」を行うことさえ可能なほどだ。
それは、同社が10年以上の研究開発で培ったという筋電インターフェイスの圧倒的な精度と応答性によるもの。筋電から動作意図を推定するだけでなく、個人ごとや時間によって変化する筋電の特徴に応じてパラメータを微調整する技術も実装しており、それらを総称して「個性適応技術を用いた筋電解析」と呼んでいる。
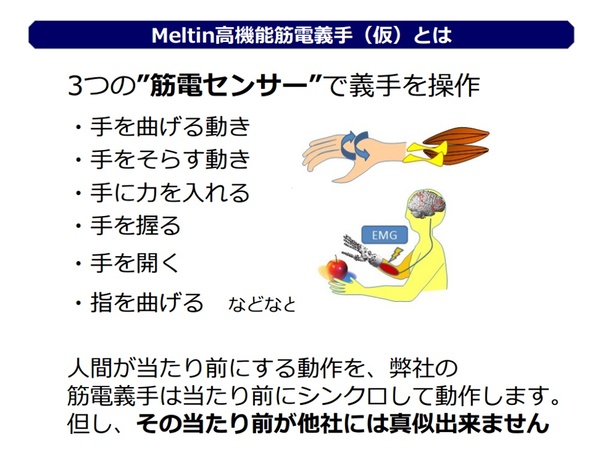
人間が当たり前にする動作と当たり前にシンクロして動作する
そのほかメルティンの技術優位性
その技術的優位性を示す次のようなエピソードもある。
(→次ページ、イライラ棒に挑戦できた唯一の義手)
本記事はアフィリエイトプログラムによる収益を得ている場合があります













で240Hz&0.03msという欲張り4Kゲーミングディスプレーが至高の逸品すぎた")






















