




























【VeritasChain】VeraSnap v1.5 リリース。世界初※ スマートフォン向けマルチセンサー不正検知と ソフトウェアベース画面再撮影検出。Android版も世界正式公開完了。
VeritasChain
気圧センサーによる環境証跡、生理的振戦パターン解析による人間存在証明、NTPベースの時刻整合性検証に加え、モアレパターン解析・ローリングシャッターフリッカー検出・輝度分布解析の3モーダル融合。

VeraSnap for iOS
VeritasChain株式会社(本社:日本東京都渋谷区、代表:上村 十勝)は、暗号学的証拠キャプチャアプリ「VeraSnap」の最新バージョン v1.5 を本日リリースいたしました。
また、Google Playの審査が完了し、VeraSnap for Androidが正式に公開されました。
https://play.google.com/store/apps/details?id=org.veritaschain.verasnap
※ v1.5については、AppStore/Google Playのアップデートが承認され次第配信されます。
◼️ VeraSnapの開発・アップデート背景

AIの急速な進化により、ディープフェイクの脅威はもはや他人事ではなくなりました。
2024年だけでディープフェイク動画は前年比550%以上増加し、選挙介入、詐欺、非同意性的画像といった深刻な被害が世界中で拡大しています。
AI生成コンテンツによる詐欺被害額は2027年までに米国だけで400億ドルに達すると予測され、「何が本物で何が偽物か分からない」という不安は、報道、司法、日常のコミュニケーションすべてに影を落としています。
既存のディープフェイク検出技術は、AIと検出のいたちごっこから逃れられません。本質的に必要なのは、事後の検出ではなく「撮影した瞬間に、それが本物であることを暗号学的に証明する」アプローチです。
VeraSnapは、この発想に基づいて設計された証跡カメラアプリです。
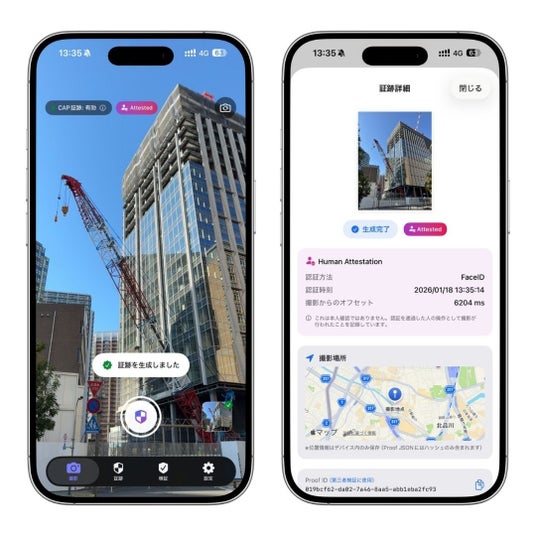
撮影の瞬間にRFC 3161タイムスタンプ、ハードウェア署名、生体認証を組み合わせた暗号学的証跡を自動生成し、「いつ・どこで・誰が・どのデバイスで」撮影したかを数学的に証明します。
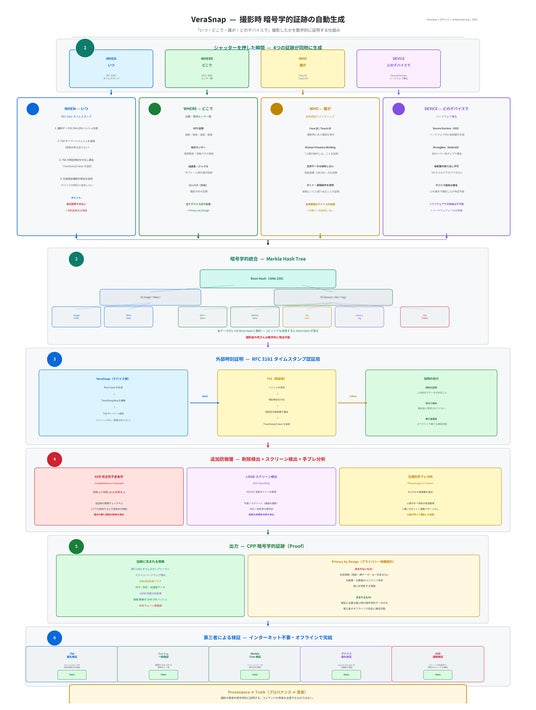
LiDARによるスクリーン検出やXOR完全性検証といった独自技術により、画面の再撮影攻撃や証拠の選択的削除も検知可能です。
しかし、技術がどれほど優れていても、使われなければ意味がありません。
VeraSnap for iOS
VeraSnapは「暗号学的証跡の民主化」を掲げ、3つの原則を徹底しています。
第一に、すべてのコア機能を無料で提供しています。
タイムスタンプも、署名も、LiDARスクリーン検出も、課金の壁は一切ありません。
第二に、技術基盤であるContent Provenance Protocol(CPP)をIETF Internet-Draftとして公開し、GitHubでオープンソース化しています。
誰でも検証でき、誰でも実装できる透明性が、信頼の土台となります。
第三に、複雑な暗号技術を意識させない直感的なUI/UXを実現しました。
通常のカメラアプリと同じ操作感で、撮影するだけで法的にも通用しうるレベルの証跡が自動生成されます。専門知識は不要です。
ディープフェイク時代において「本物の証明」は、専門家や大企業だけの特権であってはなりません。VeraSnapは、スマートフォンを持つすべての人に暗号学的証跡の力を届けます。
AppStoreでダウンロード
GooglePlayでダウンロード
◼️ アップデート概要

VeraSnap for Android
本バージョンでは
- 気圧センサーによる環境証跡
- 生理的振戦パターン解析による人間存在証明
- NTPベースの時刻整合性検証
の3つの不正検知センサー群に加え、LiDAR非搭載デバイスでも動作するソフトウェアベースの画面再撮影検出エンジン(モアレパターン解析・ローリングシャッターフリッカー検出・輝度分布解析の3モーダル融合)を新たに搭載しました。
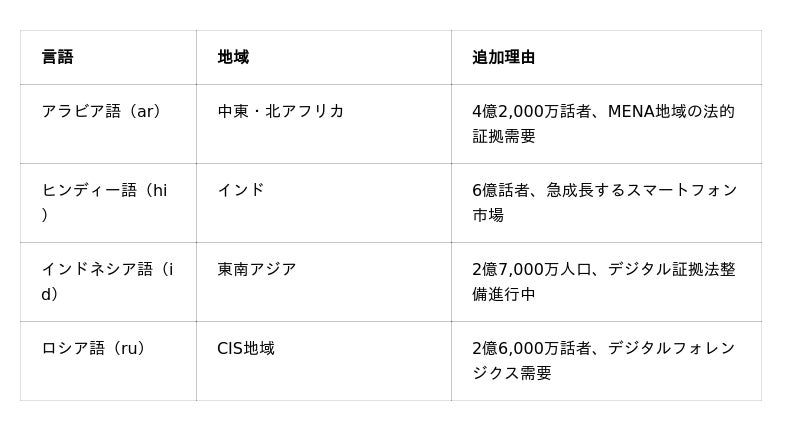
さらに、対応言語を従来の10言語から14言語へ拡張し
- アラビア語
- ヒンディー語
- インドネシア語
- ロシア語
を新規追加しています。
VeraSnapは、Content Provenance Protocol(CPP)v1.5に準拠し、Apple Secure Enclaveによるハードウェア署名、RFC 3161タイムスタンプ、生体認証バインディング、XOR完全性不変量による削除検出を組み合わせた、消費者向けとしては世界初※1の包括的デジタル証拠プラットフォームです。
1. 気圧センサーによる環境証跡(Barometric Pressure Attestation)
気圧センサーによる環境証跡(Barometric Pressure Attestation)
技術概要
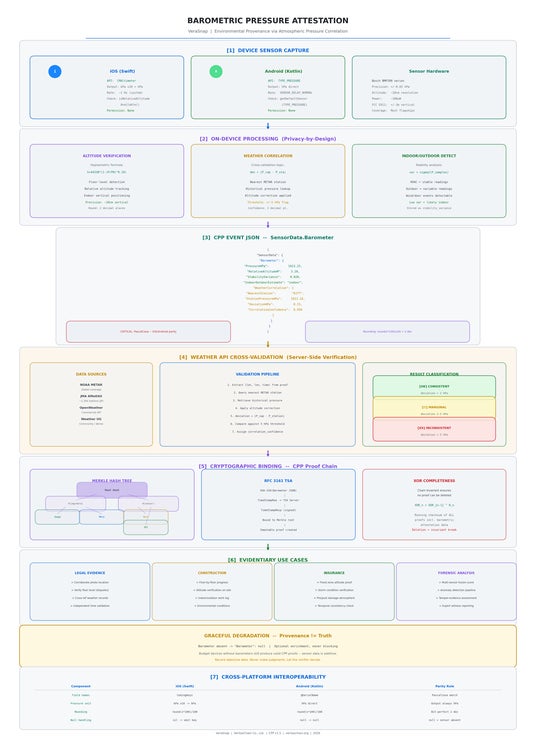
iPhone 6以降に搭載されるBosch BMP390系気圧センサー(精度:±0.03 hPa、高度分解能:約10cm)を活用し、撮影時の環境情報を暗号学的証跡に記録します。
iOS標準のCMAltimeter APIを使用し、ユーザーへの追加の権限要求なしに動作します。
証跡データ
撮影時に以下の3つのデータを自動取得し、CPP準拠のJSONプルーフに埋め込みます。
絶対気圧(hPa):撮影地点の大気圧を記録。気象庁・NOAA等の公開気象データとクロスバリデーションすることで、撮影日時と場所の独立した裏付けが可能です。
相対高度(m):アプリ起動時からの高度変化を記録。ビル内のフロア特定(約3m/階)や、地下・屋上など垂直方向の位置証跡を提供します。
環境安定性:気圧の時間変動パターンから屋内(HVACによる安定した気圧)と屋外(気象変動による不安定な気圧)の推定が可能です。
CPP JSON出力例
{
"Barometer": {
"Available": true,
"PressureHPa": 1013.25,
"RelativeAltitudeM": 3.2,
"Timestamp": "2026-02-11T10:30:00.123Z"
}
}
証拠力
気圧データは単独では決定的な証拠力を持ちませんが、GPS座標ハッシュ・RFC 3161タイムスタンプと組み合わせることで、撮影環境の多角的な裏付けとなります。
特に、気象データとの照合により「その日時・その場所で、その気圧が観測されることは物理的に妥当か」という独立検証が第三者にも可能です。
バッテリー消費は約100μWと無視可能なレベルです。
2. 生理的振戦パターン解析(Physiological Tremor Analysis)
生理的振戦パターン解析(Physiological Tremor Analysis)
技術概要
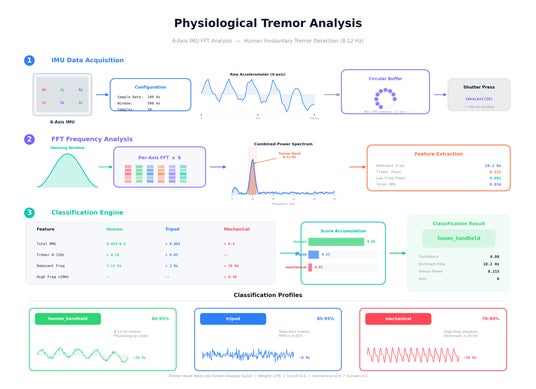
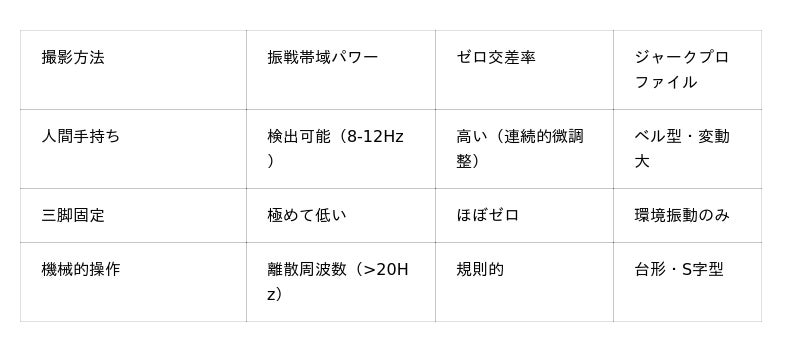
人間の手は不随意の生理的振戦(8~12Hz)を示し、これは三脚・ロボット・機械的撮影では原理的に再現できません。
VeraSnap v1.5は、撮影時の500ミリ秒間にわたる加速度センサーおよびジャイロスコープの6軸データを100Hzでサンプリングし、Accelerate.framework(vDSP)による高速フーリエ変換(FFT)で周波数解析を行います。
6軸IMUデータ(500ms / 100Hz)
↓
ハニング窓適用 → FFT
↓
特徴量抽出:
・支配周波数(Hz)
・8-12Hz帯域パワー比(生理的振戦バンド)
・0-2Hz帯域パワー(意図的動作)
・軸間相関係数
・ジャーク(加速度微分)の滑らかさ
↓
分類判定 → human_handheld / tripod / mechanical / unknown
検出精度と分類基準
学術研究(複数大学による検証)では、人間 vs 機械的撮影の識別において95~97%の精度が報告されています。
三脚撮影の検出は証拠としての信頼性を直ちに損なうものではありませんが、自動化された証拠捏造に対する重要な防御層を提供します。
3. NTPベース時刻整合性検証(Time Consistency Verification) 技術概要
NTPベース時刻整合性検証(Time Consistency Verification)
デバイス時計の改ざんは、証拠偽造における最も基本的な攻撃ベクトルの一つです。
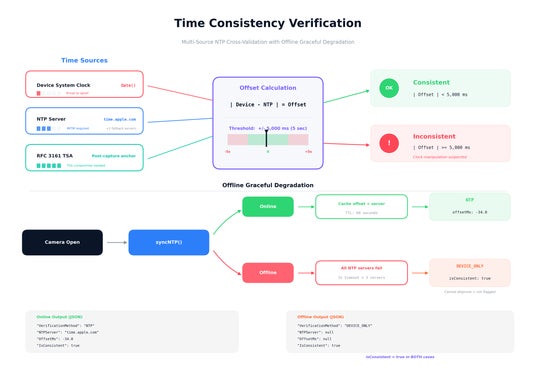
VeraSnap v1.5は、撮影時にデバイス時計とNTPサーバー時刻を同時に取得し、両者の差分(オフセット)を検証します。
検証フロー
撮影時刻取得
├─ デバイスシステム時計(Date())
└─ NTPサーバークエリ(バックグラウンド同期)
├─ time.apple.com(優先)
├─ ntp.nict.jp(NICT:日本標準時)
└─ pool.ntp.org(フォールバック)
↓
差分計算:|デバイス時刻 − NTP時刻| = オフセット(ms)
↓
閾値判定:±5,000ms以内 → 整合 / 超過 → ⚠️ 不整合
オフセットが閾値を超えた場合、CPP JSONのTimeConsistencyフィールドに"IsConsistent": falseが記録され、検証時に警告が表示されます。NTPサーバーへの到達が不可能な場合(オフライン環境)は"VerificationMethod": "DEVICE_ONLY"として記録され、RFC 3161タイムスタンプとの事後的クロスチェックにより補完されます。
NTP時刻の精度は±10~50msであり、GPSタイムスタンプ(±10-100ns)と組み合わせることで、連邦証拠規則901(b)(9)に基づく電子記録の認証要件を満たすレベルの時刻証跡を提供します。
4. ソフトウェアベース画面再撮影検出(Software Screen Detection Engine)
課題と解決策
従来のVeraSnapでは、LiDAR搭載デバイス(iPhone 12 Pro以降)でのみ深度センサーによる画面検出が可能でした。
v1.5では、LiDAR非搭載のすべてのiPhoneで動作するソフトウェアベースの画面検出エンジンを新たに搭載しました。
これにより、iPhone SE・iPhone 15(無印)・iPhone 16(無印)など、より幅広いデバイスで画面再撮影(スクリーンの写真を撮影して証拠を偽造する攻撃)を検出できます。
3モーダル融合アーキテクチャ
撮影画像の中央256×256ピクセル領域をグレースケール変換し、以下の3つの独立した解析を並列実行します。
1. モアレパターン解析(重み:35%)
![]()
モアレパターン解析
ディスプレイのピクセルグリッドとカメラセンサーの干渉により生じるモアレ縞を、2次元FFT(高速フーリエ変換)により検出します。Garcia & de Queiroz(IEEE TIFS, 2015)の手法に基づき、中高周波帯域のエネルギー比率・ピーク鋭度・スペクトルエントロピーからスコアを算出します。
自然画像は拡散的なスペクトルを持つのに対し、ディスプレイ画像は離散的なピークを示すことを利用しています。
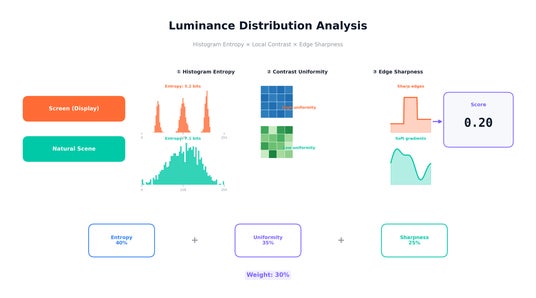
2. 輝度分布解析(重み:30%)
モアレパターン解析
ディスプレイと自然シーンの輝度特性の差異を3つの指標で定量化します。ヒストグラムエントロピー(ディスプレイは量子化された離散レベルのため低エントロピー)、ローカルコントラスト均一性(バックライトの均一性によりディスプレイは高均一性)、エッジシャープネス(ピクセル境界によりディスプレイは鋭いエッジを持つ)の3要素をSobelフィルタベースの勾配解析と合わせて総合判定します。
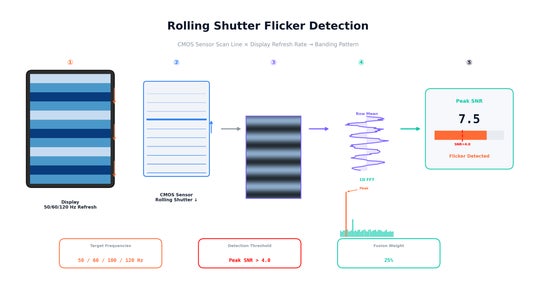
3. ローリングシャッターフリッカー検出(重み:25%)
ローリングシャッターフリッカー検出
CMOSセンサーのローリングシャッター特性を利用します。ディスプレイのリフレッシュレート(50/60/100/120Hz等)と走査線読み出しのタイミング差により生じるバンディング(横縞)を、行方向輝度平均の1次元FFTにより検出します。ピーク信号対ノイズ比(SNR)が閾値(4.0)を超えた場合にフリッカー検出とします。
融合スコア計算
Combined_Score = 0.35 × Moire + 0.30 × Luminance + 0.25 × Flicker + 0.10 × (1 − Tremor)
IMU振戦解析(§2)の結果もボーナス重みとして統合され、三脚固定(0.4)や機械的操作(0.8)の場合に画面検出スコアが上昇します。人間手持ち撮影(0.1)の場合はほぼ影響しません。
性能指標
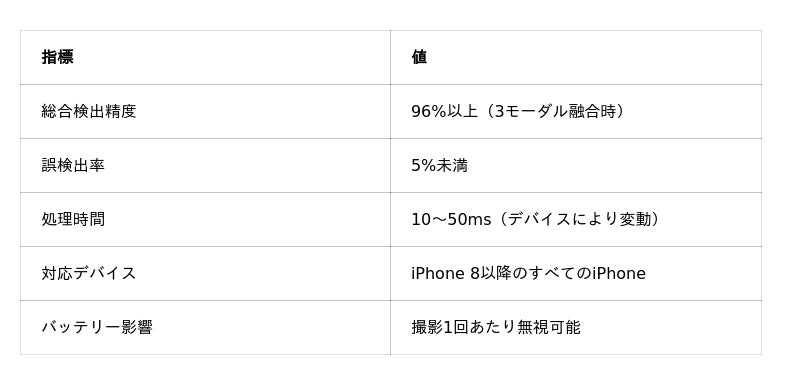
すべての信号処理はApple Accelerate.framework(vDSP)によりオンデバイスで実行され、画像データが外部に送信されることはありません。
5. 14言語ローカライゼーション 新規追加言語(4言語)

v1.5では、以下の言語を新規追加し、合計14言語に対応しました。
全対応言語一覧(14言語)
- 英語(プライマリ)
- 日本語
- 韓国語
- スペイン語
- フランス語
- ドイツ語
- ポルトガル語
- 中国語簡体字
- 中国語繁体字
- アラビア語
- ヒンディー語
- インドネシア語
- イタリア語
- ロシア語
すべてのUI文字列、センサー表示ラベル、法的免責事項、不正検知ステータス表示を含む全インターフェースが各言語に完全翻訳されています。
アラビア語についてはRTL(右から左)テキスト方向にも対応しています。
先行技術の時系列統合
2001年 RFC 3161(TSAによるタイムスタンプ標準)公開 [C]
2008年 ATI Technologies:ローリングシャッタ×フリッカー検出特許(優先日)
WO/2010/054484、EP2356811、JP5866200B2 [C]
2009年 日本放送協会:モニタ再撮影モアレ低減特許(出願日)[C]
2012年 CameraV/InformaCam:気圧(hPa)・加速度・ジャイロの生データを
PGP署名付きJ3Mメタデータとして記録(消費者アプリ)[A]
2015年 モアレ等を用いた提示攻撃/スプーフィング検出研究(顔認証分野)[C]
Garcia & de Queiroz, IEEE TIFS:モアレパターン解析手法 [B]
Truepic:画像真正性関連特許(優先日)[C]
2016年 CertiPhoto:RFC 3161 TSA+NF Z42-013準拠ハッシュチェーン
(消費者アプリ、フランス)[A][B]
2017年 ProofMode(WITNESS/Guardian Project):暗号署名+センサスナップショット
アプリとして公開 [A][C]
2020年 Truepic×Qualcomm:セキュア領域で時刻・位置タグ付けプロトタイプ報道 [C]
2021年 Truepic:センサ+TSAサーバ+デジタル署名 特許(優先日2021-03-10)
US/EP/WOファミリー [C]
USENIX Security '21:mID - モアレを用いたスクリーン写真フォレンジクス [C]
2022年 C2PA仕様公開(RFC 3161ベースのタイムスタンプ要件を含む)[C]
Truepic Lens SDK:C2PA準拠、35テスト/画像(エンタープライズ向け)[A]
2023年 Click Camera (Nodle):ブロックチェーン+C2PA+Face ID(v1.9.0) [A]
ProofMode iOS版公開(2023年3月8日)[A]
2024年 Sony Camera Authenticity:PDAF深度ベース画面検出(プロカメラ限定)[A]
Microsoft Content Integrity(Truepic基盤)[A]
2025年 USENIX Security '25 Scoop:recapture攻撃を主要課題として定義、
深度等で緩和するアプローチ提示 [C]
Google Pixel 10:C2PA対応、オンデバイスTSA [A]
2026年 VeraSnap v1.5:4検知(気圧・振戦・NTP・SW画面検出)+RFC 3161
+CPP統合を主張(2026-02-11)[A][B][C]
時系列分析から導かれる結論
個別技術要素はいずれも2008~2021年の間に概念・出願・実装が先行しています。
(調査機関[A]/[B]/[C])
VeraSnap v1.5の新規性は、これらの個別要素を「特定の組み合わせ」として「消費者向けアプリ」に統合した点に限定されます。
4つの不正検知機能+RFC 3161+CPPの統合において、これと同等の機能統合を実現したコンシューマー向けスマートフォンアプリは、3機関いずれの調査においても2026年2月11日時点でグローバル市場において確認されなかった。
「商用製品の初(First commercial product)」としての世界初クレームは、自己定義の範囲内で成立可能性がある。
ただし、「概念の初出」「出願の初」「公開デモの初」としての世界初は否定される。新規性は個別技術の発明ではなく、既存技術の特定の組み合わせによる統合にある。
VeraSnapの自己定義した複合要件を満たすコンシューマー向けアプリの先行は確認されなかった。
設計原則
VeraSnapの全機能は「Provenance ≠ Truth(証跡は真実ではない)」の原則に基づいて設計されています。
本アプリは、コンテンツがいつ・どこで・どのように・誰によって撮影されたかを暗号学的に証明しますが、撮影内容の真偽を主張するものではありません。
この区別は法的な正確性と規制準拠の双方において不可欠です。
入手方法
VeraSnapはApp Storeにて無料でダウンロードいただけます。基本的な暗号学的証拠キャプチャ機能(不正検知センサー・画面検出を含む)はすべて無料でご利用いただけます。
App Store: https://apps.apple.com/app/id6757994770
Google Play:
https://play.google.com/store/apps/details?id=org.veritaschain.verasnap
CPP仕様書: https://github.com/veritaschain/cpp-sec
AppStoreでダウンロード
Google Playでダウンロード
本件に関するお問い合わせ

VeritasChain Co., Ltd.
広報担当
E-mail: developers@veritaschain.org
Web: https://veritaschain.org
※1 「世界初」は、消費者向けスマートフォンアプリにおいて、気圧センサー環境証跡・IMU振戦パターン解析・NTP時刻整合性検証・ソフトウェアベースマルチモーダル画面再撮影検出(モアレ+フリッカー+輝度分布の3モーダル融合)を、RFC 3161暗号学的タイムスタンプおよびオープン標準プロトコル(CPP)と統合した製品として。2026年2月11日時点、当社調べ。
詳細は当プレスリリースに添付のPDFをご確認ください。
※本プレスリリースに記載の検出精度は、学術研究に基づく理論的期待値であり、実環境での性能はデバイス・撮影条件・対象ディスプレイにより変動します。
本記事はアフィリエイトプログラムによる収益を得ている場合があります