




























視触覚ロボットハンドの革新的プロダクトをローンチ
株式会社FingerVision
【大学発触覚センシング技術を開発するFingerVision】
大学発の「視触覚」技術の実用化を通じて、ロボットや機械の適用範囲を広げ、様々な社会課題を解決することを目指す株式会社FingerVision(代表取締役:濃野友紀、以下FingerVision)は、自動車、電気機器、素材、半導体、物流、医療をはじめとする様々な業界に向けに、ロボットハンドの新製品ランナップを販売開始します。従来、販売していた「1種類のサイズ・形状」と「2種類の触覚情報(力、滑り)」を標準とした視触覚ロボットハンドに加えて、今後は、様々なニーズにお応えするために、ロボットハンドの先端部(以下、フィンガー)や視触覚情報(力、滑りだけでなく、堅さや位置情報など)のバリエーションを格段に充実させた製品ラインナップとなります。
FingerVisionの視触覚ロボットハンドを活用して、既にロボットシステムとしての現場実装が進んでいる食品業界向け用途にとどまらず、様々なロボット用途にご利用頂けます。

人の指サイズのロボットハンド
1.ロボットハンドの従来モデルとの差分
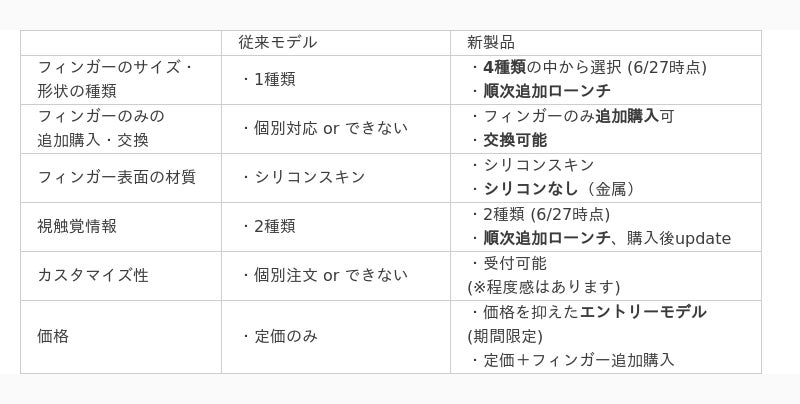
2.新製品コンセプト
従来の視触覚ロボットハンドは、下記動画のように1種類のフィンガーで様々なワーク(不定形・多品種、柔らかい、偏荷重が起きる、もろいなど)のハンドリングを実現していました。
https://youtu.be/bZeFwQkTvoI
ただし、「XXな工程で」、「XXな対象物を」、「XXのよう扱いたい」というニーズは、業界や事業、製品によって文字通り千差万別であり、ベストなオプションを選べず諦める、という声を頂いておりました。例えば、従来のフィンガーでは大きすぎる、厚みがあるため、実際にワークを持てたとしても生産ラインに本導入するにはネックとなる、などの評価もありました。そこで、フィンガーを様々なサイズや形状の中から「選べる」、「交換できる」、「機能拡張できる」、「カスタマイズできる」、ことを可能にすることで、お客様が持つそれぞれの課題・ニーズに対してベストフィットする視触覚ロボットハンドをご選択頂けます。
さらに、期間限定で、初期費用を抑えたエントリーモデルを用意することで、多くの皆様にお試し頂ける環境を整えました。
3.基本編:4つの標準ラインナップ
Cyl1
局面形状の把持面により、円筒形のワークやブラシの様に束ねられているワーク、小型のウエハなどのハンドリングを実現します。

局面形状の把持面
SS2
人の指先よりも細い形状で、バラ積みピッキング時/プレーシング時のスペースが狭い場合や、小型ワークへの汎用的な対応を実現します。

人の指先よりも細い形状
α on β
グリッパからの距離を近くすることで把持力をロスなく伝達できるようになります。従来形状のバージョンアップタイプであり、今まで同様の汎用性を実現します。

汎用性の高い形状
M6
食品業界の「おかず盛付ロボット※」に使用されているフィンガーと同形状(ただし、取り外し機構なし)。カップ状かつ把持面に凹凸を作ることで摩擦を作り、食材に代表される柔らかく、不定形なワークに対して、少ない把持力でのナイーブなハンドリングを実現します。
※おかず盛付ロボット:https://prtimes.jp/main/html/rd/p/000000021.000095912.html

壊れやすいワークを包み込む形状
4.さらに応用編:カスタマイズの具体例
L1
手のひらサイズの大きめの把持面により、より多くの面をワークと接触させることで、少ない把持力でのハンドリングが可能になります。これにより大きいサイズのワークや、摩擦が少ない場合でも安定したハンドリングを実現します。

手のひらサイズ vs 従来サイズ
D2
すくい上げる形状を作ることで、平らな形状や脆いワークなどのハンドリングを実現します。
※同フィンガーを巻き寿司の盛付けで活用している動画
:

すくい上げる形状
5.今後のアップデート
6/19-21に開催された「ものづくりワールド2024」で正式ローンチ前の先行展示を行いましたが、様々な業界のお客様から多くの引き合いを頂きました。
今後も様々なフィンガーや視触覚情報を随時ラインナップに追加していきます。新着情報が必要な方は後述のSNSやPRTIMEのフォローをお願いします。
その他、エントリーモデルのお問い合わせや、購入のご希望は、メールもしくはホームページの問い合わせフォームよりご連絡ください。
・メール:contact@fingervision.jp
・URL: https://www.fingervision.jp/contact
◆会社概要
・社名: 株式会社FingerVision
・代表取締役: 濃野友紀
・開発拠点:
・東京都江東区東陽二丁目4番1 4号 三井ウッディビル1F ※移転しました
・京都府京都市下京区朱雀宝蔵町73-1 ライトワンビル1F
・設立: 2021年10月
・会社HP:https://www.fingervision.jp/
・YouTube: https://www.youtube.com/channel/UCRgZuTJvDxjD_7ta03BRQFA
・LinkedIn: https://www.linkedin.com/company/fingervision/
・X/Twitter: https://twitter.com/Yuki_Nono_fv
・メール:contact@fingervision.jp
◆技術概要
「画像(カメラ)をベースに触覚を再現する」というコンセプトをコア技術としています。ロボットハンド等の指先に搭載することで、触覚(力や滑りの分布等)を知覚できるようになり、あたかも人が「手のひら」の感覚を使って物体を扱うような“いい感じの”制御をロボットで実現できます。高機能(高分解能・マルチモダリティ)でありながら、経済性に優れる実用性の高さが特徴です。「触覚」センサとは言いつつも、把持対象物を見る(視覚)モダリティも備えた、まったく新しいコンセプトの「視触覚センサ」であり、ロボットと組み合わせたプロセス自動化だけでなく、無限の応用可能性を持ちます。
本記事はアフィリエイトプログラムによる収益を得ている場合があります