自動走行ロボットと共存する社会をどう捉えていくか。「歩行空間ネットワークデータ」を用いた実証実験でルート上のエレベーターと情報連携!

この記事は、国土交通省による歩行空間データの活用を推進する「バリアフリー・ナビプロジェクト」に掲載されている記事の転載です。
11月26日に「歩行空間ネットワークデータを用いた自動走行ロボットの走行実証」が行われました。これは、近い将来に配送を行う自動走行ロボットが我々の生活空間に溶け込み、より便利でユニバーサルな社会にして行くための実証実験です。

国土交通省が推進する「バリアフリー・ナビプロジェクト」の一環として、「歩行空間ネットワークデータを用いた自動走行ロボットの走行実証」が行われた。
今回の実証実験は、2014年から国土交通省主導で整備を推進している「歩行空間ネットワークデータ」を用いて経路設定をした自動走行ロボットの運用を目指したもの。
「歩行空間ネックワークデータ」は、道路上の段差をはじめとした歩行の支障となるさまざまなバリア情報や、エレベーターや階段などの道路の特性などを集積したものです。オープンデータとなっており、誰でも利用することができます。これを活用することにより、車いす使用の方などにあわせた移動ルートの検索といったことが可能です。
さらに障害者に向けた利用だけではなく、このデータを自動走行ロボットのルート設定に生かすことで、あらゆる人の役に立てることができるのです。
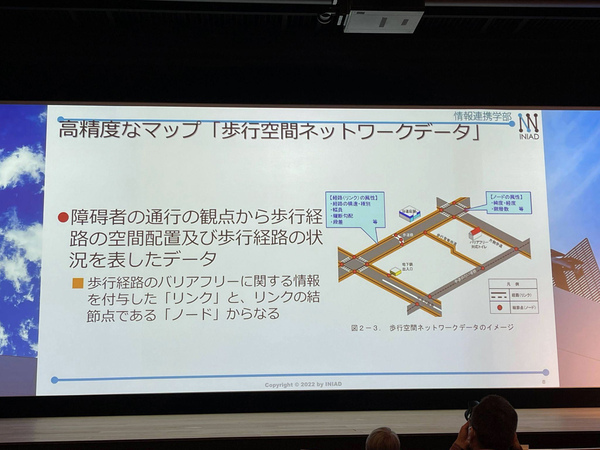
道路上の車道と歩道の段差、階段、スロープ、信号、横断歩道、踏切、エレベーターなどさまざまな情報から構築されたデータ群を「ph歩行空間ネットワークデータ」と呼ぶ。
実証実験に先駆けて、国土交通省総合政策局総務課(併)政策統括官付 政策企画官 松田和香氏による本プロジェクトの概要説明が行われました。

国土交通省総合政策局総務課(併)政策統括官付 政策企画官 松田和香氏
松田氏は「ICTを活用した歩行者移動支援」の概要について、次の3つのポイントで説明しました。
・高齢者や障害者などを含め、誰もがストレスなく自由に活動できるユニバーサル社会の構築
・バリアフリー情報を始めとするさまざまなデータをオープンデータ化
・民間事業者等がそれらのデータを自由に利活用し、多用なサービスを提供できる環境づくり
「歩行空間ネットワークデータを用いた自動走行ロボットの走行実証」に先駆けて、国土交通省 総合政策局総務課 政策企画官(併)政策統括官付 松田和香氏よりプロジェクトの概要説明があった。
この日の実証実験に先駆け、今年の6月に行なわれたプレ実証実験では、自動走行ロボットがJR赤羽駅前のコンビニエンスストアから、500メートルほど離れたヌーヴェル赤羽台団地までの市街地を走行。運行経路の3D点群データの収集と、運行経路のバリア等のデータ収集を行ないました。

6月の実証実験では自動走行ロボットはオペレーターによる有人操作だった。その主目的はルート上の各種データ収集。
参考記事
・「自動走行ロボットにもバリアフリー情報を。この秋「歩行空間ネットワークデータ」を活用した配送実験実施へ」
https://www.barrierfreenavi.go.jp/closswalk/2135201.html
・「自動走行ロボット「プレ実験」ソフトウェア開発担当者に話を聞いた!」
https://www.barrierfreenavi.go.jp/closswalk/2135365.html
・車いすが通れる道は自動走行ロボットでも進めるのか?実証実験の課題を聞く
https://www.barrierfreenavi.go.jp/closswalk/2224712.html
今回の実証実験では、6月のプレ実証実験で取得したデータをもとに、同じルートでのより実践的な自動運航を目指したものです。
自動走行ロボットが走行するルートの選択には、ロボットが通れる幅があるか、段差はタイヤが乗り越えられる高さなのか、など考慮すべき条件が多くあります。歩行空間ネットワークデータを用いることで、その条件にあった経路探索が容易にできるようになるのです。
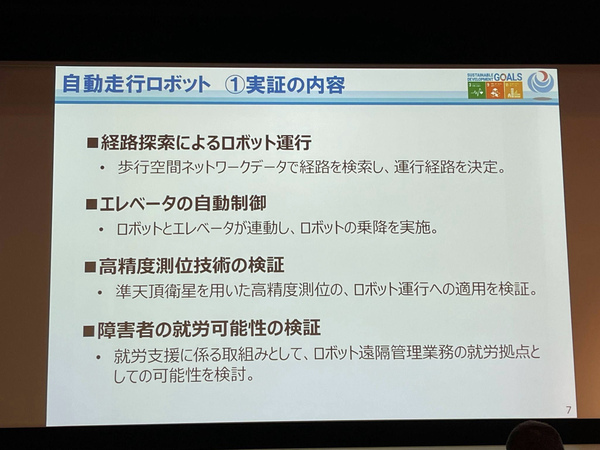
さらに、本格的な自動走行に向け以下の4点の検証が本実験の主目的となっています。
1 経路探索によるロボット運行
2 エレベーターの自動制御
3 高精度測位技術の検証
4 障害者の就労可能性の検証
「歩行空間ネットワークデータを用いた自動走行ロボットの走行実証」が目指すもの
実証実験に先駆けて、主催者であり「ICTを活用した歩行者移動支援の普及促進検討員会」の委員長も務める、INIAD東洋大学情報連携学部学部長 坂村健氏から概要説明がありました。
INIAD東洋大学情報連携学部学部長 坂村健氏
「バリアフリー・ナビプロジェクトでは歩行空間ネットワークデータを活用し、最新技術で何ができるかを考えています」と坂村氏。
「これまで視覚障害者が目的地まで移動するための手段のひとつに点字ブロックがありました。しかし、車いす使用者にとってはこの点字ブロックが逆に障害物(バリア)になってしまうわけです。そういう矛盾を解決するために、情報通信技術による正確な位置情報と、どの道が通れてどの道が通れないのかなどの道路情報を使うことで目的地までの最適な経路を選ぶことが可能になります」
坂村氏によると、このプロジェクトの基本的な考え方は障害者のためだけでなく誰もが使えるユニバーサルなものとして考えよう、というものとのこと。
「そんなユニバーサルな考えのひとつとして、ロボットの自動走行の経路選択は例えば車いすの最適な経路選択と似ているのではないかとなりました。今回のこのプロジェクトは人間だけじゃなく、ロボットにとっても最適なルートとして利用できるユニバーサルデザインなものではないかと。そういう訳で、実証実験をしてみようということになった次第であります」
「歩行空間ネットワークデータ」は障害者のみではなく、自動走行ロボットとっても有益なものになると語る坂村氏。
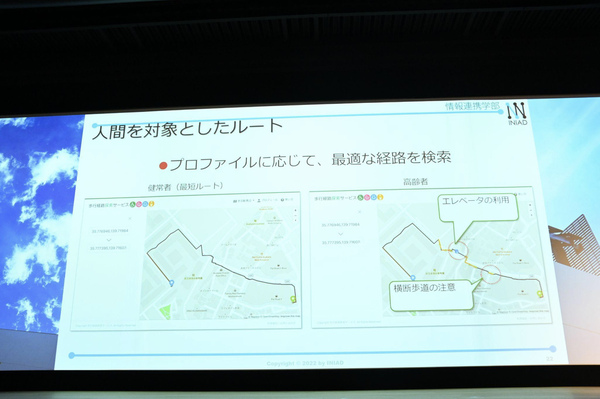
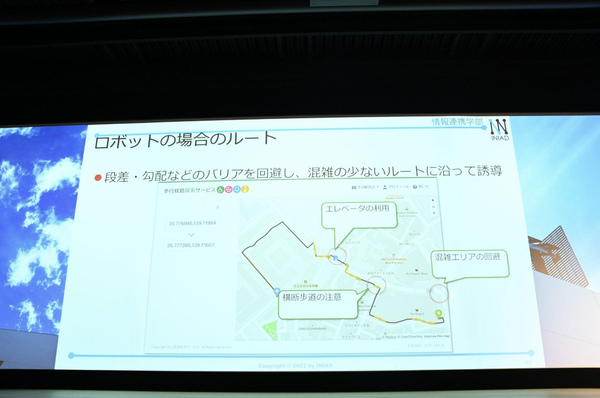
エレベーターの利用、横断歩道の注意など、高齢者・障害者の最適な移動ルートと自動走行ロボットの移動ルートは似ている点が多い。
今回の自動走行ロボット実証実験の狙い
今回の実証実験の目的は、6月のプレ実験で得たルート上の「運行経路の3D点群データ」と「運行経路のバリア」を元に、同じルートでレベルを上げた自動走行を行ないつつ「経路探索によるロボット運行」「エレベーターの自動制御」「高精度測位技術の検証」「障害者の就労可能性の検証」の4点を検証することです。
今回の実証実験では自動走行ロボットを使ったより実践的な検証が行われた。
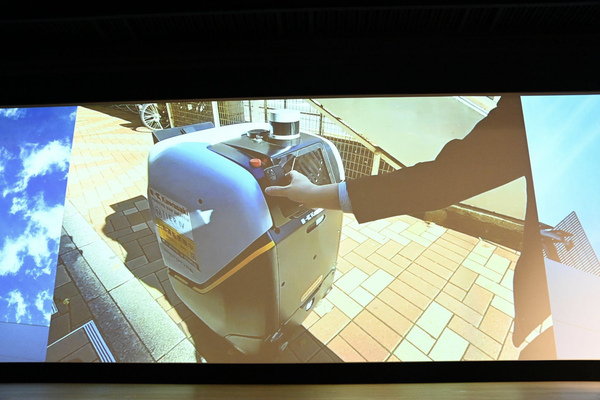
使用する自動走行ロボット「FORRO」は、4輪のついた大型トランクのようなボディで、後ろの2輪が電動で駆動。通常の走行速度は3km/hで最大速度が6km/h。本体上面に取り付けされた筒状のレーザーセンサー(LiDAR)により周囲の障害物などを検知し、自動での走行が可能。


川崎重工業とティアフォーが共同開発した自動走行ロボット「FORRO」。後部を開けると最大30kgの荷物を載せることができるカーゴスペースが出現。
当日は坂村氏のプレゼン中に、JR赤羽駅前のコンビニエンスストアから自動走行ロボット「FORRO」が、発表会場であるヌーヴェル赤羽台団地までを自動走行する様子が中継される予定だったのですが、残念ながら早朝から降り出した小雨で急遽中止になり、プレゼンは4日前のテスト走行時に撮影したビデオを見ながら、坂村氏が解説するプログラムに変更。
動画のなかでは自動走行ロボットが歩行空間ネットワークデータをもとに最適なルートを走行。ルート上の人や車などの障害物はロボットのレーザーセンサーからの情報を使って回避、自動で移動する模様が映し出されました。
自動走行ロボットのカーゴスペースに荷物を入れ、QRコードなどを使って行先を指定。そうすることで、ロボットは「歩行空間ネットワークデータ」をもとにルートを算出、目的地まで最適なルートを計算し移動を開始します。
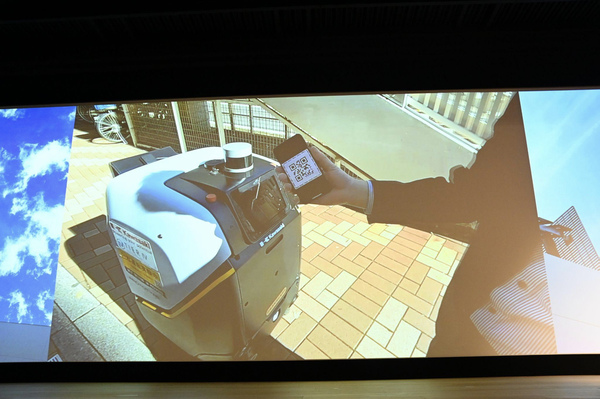
スマホのQRコードを読み込ませて行き先を指定する。
今回のルートは6月のプレ実証実験と同じ、赤羽駅前のコンビニエンスストアから「ヌーヴェル赤羽台団地」までの約500メートル。
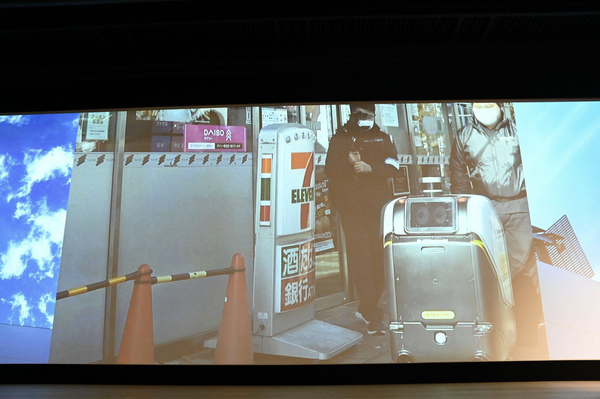
スタート地点は赤羽駅前のコンビニエンスストア。
今回は公道での実証実験ということで、ロボットに紐を付けて、後ろを歩いているスタッフが紐を保持し後をついていくというスタイルで行なわれました。これは公道での実証実験の安全確保上、必要不可欠なもの。もちろん、後ろの人間はロボットのコントロールはしておらず、あくまで不測の事態があった時のために紐を保持し見守っているだけです。

ロボットに付けた紐は安全対策のため。ロボットは自動で走行している。
駐車場から出てきた車をレーザーセンサーで感知し、数メートル先で一旦停止。車を先にいかせてから再び動き出す。こういったルート上での不測の事態の対応は自動走行ロボット自体が行っています。

ルート上に現れた車などをロボットのセンサーが認識し、数メートル前で停止。
エレベーターの前ではエレベーターを呼ぶ信号をロボットが出し、エレベーターが来たら乗り込みます。このときに待っている人や降りてくる人がいた場合には人を優先させ、先の自動車のときと同じように一旦停止し待機するとのこと。エレベーターへの乗り降りも、なるべく大きく周り込むように移動し、人間の導線を邪魔しないルートを選んで走行します。
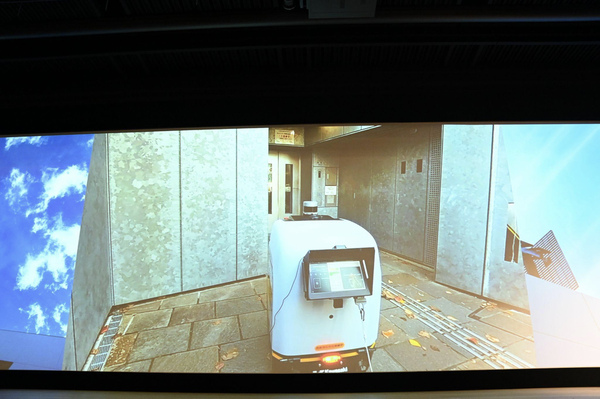
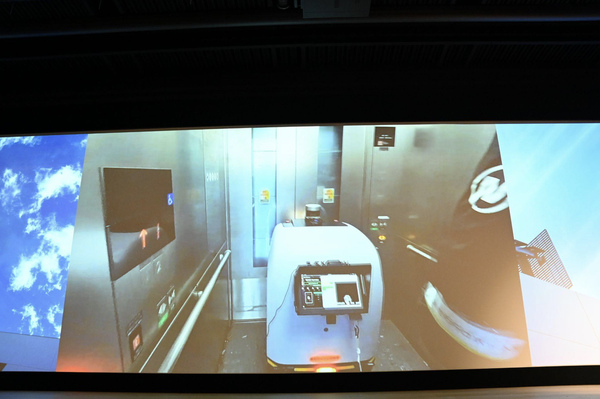
エレベーターとロボットが情報連携をして、ロボット自身がエレベーターを呼び乗り込む。ただしその際の移動はすべて人間優先で行なわれる。
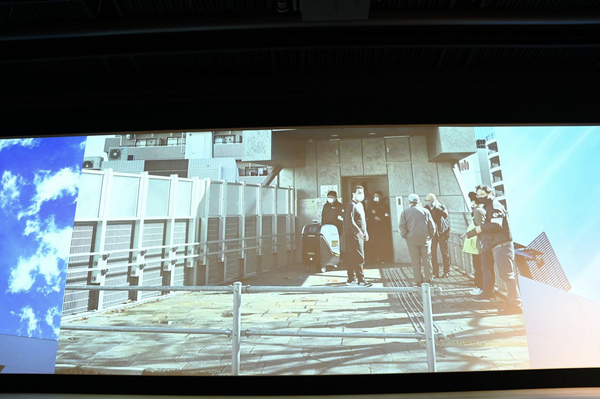
目的地の「ヌーヴェル赤羽台団地」に到着。ロボットが停止したら中から荷物を取り出し、今回の実証実験は終了しました。
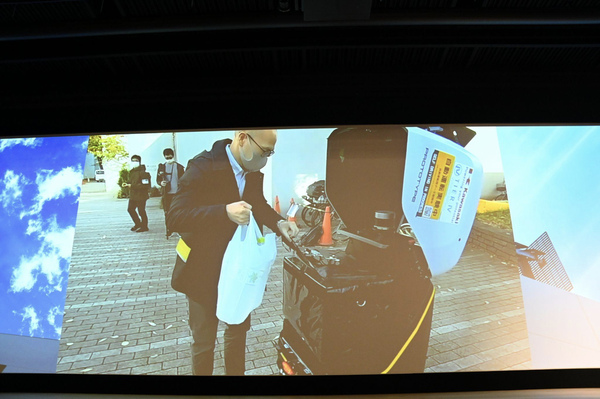
目的地の団地に到着。カーゴスペースから荷物を出して実証実験は終了。
今後は「ヌーヴェル赤羽台団地」のような場所で、自動運転ロボットをレンタルするようなサービスを提供したニーズを見込んでいるとのこと。
また自動運転ロボットだけでは解決できないようなケースを想定し、ロボットは遠隔でも操作ができます。ロボットからの映像を監視センターから見ながら、遠隔操作して不測の事態に対応する仕組みもあるとのことです。

不測の事態に備え、ロボットは監視センターからの遠隔操作もできる。
今回の実証実験の成果と今後の課題とは?
今回の実証実験なかで特筆すべきだったのは、何といっても移動するロボットとルート上にあるエレベーターとの情報連携が見事に機能していた点です。
坂村氏によると「ロボットが都市を移動するためには、バリアの回避だけでなく、エレベーターやドアなどの設備との連携動作が必要不可欠です。それには、ロボットとエレベーターなどの設備をAPI連携させる必要がある」とのこと。
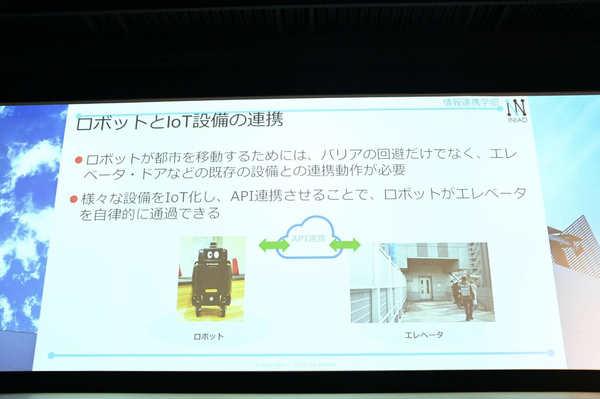
自動走行ロボットはエレベーターなどIoTに対応した設備とAPI連携することが可能。
今回の発表会の会場となったINIAD(東洋大学情報連携学部)では、ビル内に取り付けた各種センサーとの連携により、ビル内で自動走行ロボットを走らせる実験なども行っているといいます。道路上以外でも自動走行ロボットが活躍する時代が、すぐそこまで来ていると感じられました。


INIADではビル内部に取り付けられたセンサーとロボットをAPI連携させ、ビル内でのロボットの自動走行を検証している。
プレゼンテーションの最後に、質疑応答で「今回の実証実験で困難だった点と、今後超えて行かなければならない問題点を教えてください」との質問が飛びました。
これに対し、坂村氏は「今はまだロボットが公道を走れる法律がないので、まずそこを変えて行かなければならない。また新しいこと始める際に、そのことに対する皆さんの、日本社会のマインドを変えていかなければならない。技術的なことよりも、そういう点をいかに突破していくかが、今後はいちばんの課題になると考えています。今回のシンポジウムも社会に理解してもらい、皆さんにマインドをチェンジしてもらうために開催したという側面があります」と答えていました。
今後の課題は「公道で自動走行ロボットが走るための法整備」だと語る坂村氏。
今回の実証実験では技術的にはロボットの自動走行はほぼ実現可能だということが証明されましたが、今後はこういった技術面以外の、自動走行ロボットが公道を走るための法律の整備であったり、我々自身のマインドの改革であったりが必要なのだということが見えてきました。
2023年度からは完全自動運転「レベル4」の運行許可制度を盛り込んだ改正道路交通法が施行され、自動走行ロボットに関する新たな交通ルールの検討が進められています。今後、自動走行ロボットと共存する社会をどのように成立させていくのか、注目していきたいところです。