




























世界初、Visual SLAMを用いた撮影者の移動状況や天候、周囲環境に左右されないロバストな位置情報取得を実現
Cellid株式会社
従来、空間マップの作成が難しかった様々な条件下でも、空間マップ作成を可能にする手法の開発に成功し、非常にロバストな位置情報取得を実現しました。
Cellid株式会社(本社:東京都港区、代表取締役:白神 賢、以下「Cellid」)は、Visual SLAMにおいて従来、空間マップの作成が難しかった様々な条件下でも、空間マップ作成を可能にする手法の開発に成功し、非常にロバストな位置情報取得を実現したことをお知らせいたします。
Cellid株式会社は、Visual SLAMにおいて従来空間マップの作成が難しかった様々な条件下でも、空間マップ作成を可能にする手法の開発に成功し、非常にロバストな位置情報取得を実現しました。
(注) SfMといった高精細な空間マップ復元技術をVisual SLAMの空間マップ作成に活用させることで、移動状況や天候、周囲環境に左右されない非常にロバストな位置情報取得を実現したのは世界初。(2022年7月時点、Cellid株式会社調べ)
Cellidは、単眼カメラの映像をインプットとしてカメラの3次元位置情報を取得するサービス「Position Finder」を提供しています。これまで建設業等において位置情報を取得するソリューションとして使用されていたGPSやビーコンが抱えている、「高さ情報を取得できない」「GPS環境下でしか利用できない」「電源供給が必要である」などの課題を「Position Finder」は、解決する可能性があります。
「Position Finder」を使用するにあたり、ユーザは位置情報を取得するための空間マップを事前に作成する必要がありますが、従来空間マップの作成が困難な場合がありました。
今回開発した手法(以下「本手法」)により、従来、空間マップの作成が難しかった様々な条件においても空間マップの作成が可能になり、ロバストな位置情報取得を実現することができるようになります。
■従来のVisual SLAMにおける課題
Visual SLAMを用いて位置情報の取得をする際に、ユーザは空間マップを事前に作成する必要がありましたが、従来、撮影時に90度の急ターンをしてしまう、雨などにより視界不良である、白壁空間で特徴点が少ないなど、空間マップの作成が困難な場合がありました。その結果として位置情報取得の際に参照する空間マップが存在せず、作業者や建機の位置情報を取得できないという課題がありました。
■本手法の技術的特徴
SfMといった高精細な空間マップ復元技術を用いて、キーポイントの位置に対してより密な特徴点、より正確なカメラの姿勢を作成します。これらをVisual SLAMの空間マップ作成に活用することで、移動の状況や天候、周囲の環境に左右されずに非常にロバストな空間マップ作成が実現可能になりました。
また、SLAM分野で非常に知名度の高いオープンデータセットEuRoCを用いた評価を行なった結果、本手法で作成した空間マップを利用することで、SLAM実行時に自己位置の推定精度が最大で10.57倍向上することが確認できました。
(注) 上記精度評価の概要は下記の通りである。
<評価方法>
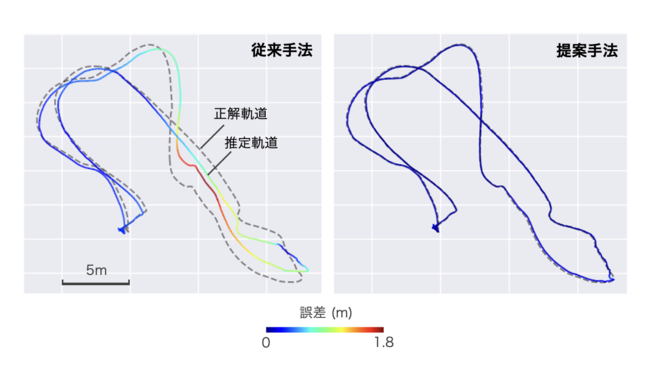
1. 従来手法でSLAMの自己位置推定を実行した場合のATEをRMSEで算出(結果1)
2. 本手法でSLAMの自己位置推定を実行した場合のATEをRMSEで算出(結果2)
3. 上記(結果1)÷(結果2)で精度差を算出
※ATEとは、Absolute Trajectory Errorの頭文字をとったもので、絶対軌跡誤差と呼ばれます。各フレームにおける正解データと推定値の位置の誤差を示したものです。
※RMSEとは、Root Mean Squared Errorの頭文字をとったもので、本評価では全フレームにおけるATEの二乗平均平方根を示しています。
<各データセットでの評価結果>
以下に、「データセット名(難易度):評価結果」の形式で記載
・MH01(easy) : 1.08倍
・MH02(easy) : 1.03倍
・MH03(medium) : 1.22倍
・MH04(difficult) : 8.30倍
・MH05(difficult) : 10.57倍
※上記に記載の難易度(easy, medium, difficult)は、EuRoCのデータセットにそれぞれ記載のあるコメントを引用し、定義しています。
(2022年7月時点、Cellid株式会社調べ)
■ユースケース
建設業などの現場において、作業員や建機の位置情報を可視化し、定量的に分析することが求められていますが、従来は動体の位置情報取得が困難で、実現できていませんでした。本手法により、撮影時の様々な条件に対応できることから、ユーザはより容易に「Position Finder」による位置情報の取得ができるようになります。
■本領域におけるCellidの強み
Cellidは、Visual SLAMに関する特許を複数出願しており、さらに本手法に関しても特許を出願しております。
また、複数の企業と共に様々な現場空間で検証を進めており、ノウハウの蓄積も行っております。
■Cellidについて
Cellidは、次世代デバイスのARグラスにおけるキーコンポーネントであるハードウエア「Display Module」と空間認識を行うソフトウエア「Cellid SLAM」の両方を提供しています。
Cellid SLAMはARグラス向け以外に、汎用カメラでも実装可能であり、産業別のソリューションとしても展開しています。
■会社概要
会社名:Cellid株式会社
所在地:東京都港区六本木4-8-6 パシフィックキャピタルプラザ5F
代表者:白神 賢
設立:2016年10月
URL:https://www.cellid.com/
事業内容:ARグラス用のディスプレイモジュールと空間認識ソフトウェアの販売
■お客様からのお問い合わせ先
Cellid株式会社
TEL:03-6447-0767
e-mail:contact@cellid.com