




じつは、話題になったポスターが制作されたのは2011年度のこと。3年ぶりに同じポーズで撮らせていただいた
6年間で10個あまりの研究・開発テーマを完了
渡辺さんが何よりスゴイのは、学部4年から博士課程卒業までの6年間で、非常に多くの研究・開発を行なってきたことだ。通常、研究室に配属された学生は、修士課程卒業までの3年間で大きめの研究テーマを1つこなせばいいのだが、渡辺さんが完了させたものは10個あまりに上る。
その内容も、モーターの高効率制御から広い速度域で安定した軌跡追従制御、誤検出の少ない測域センサ信号処理、ロボットを制御するソフトウェアプラットフォームの開発、モータードライバの開発など、非常に多岐にわたることが特徴だ。
ロボットはもともと、メカや電気回路といったハードウェアからプログラミングまで幅広い技術の集合から成り立っているため、さまざまな分野に精通していることを求められるが、渡辺さんのスーパー学生ぶりはそのなかでも群を抜いている。
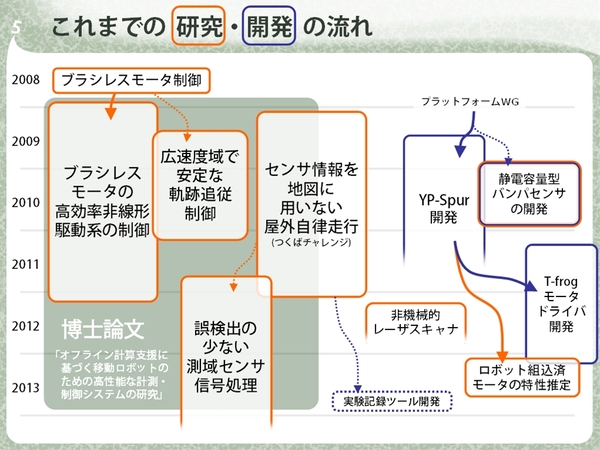
渡辺さんが6年間で完了させた研究・開発テーマ。博士論文は「オフライン計算支援に基づく移動ロボットのための高性能な計測・制御システムの研究」
渡辺さんのアイデアと実装力をわかりやすく示すのが、毎年5月に研究室メンバー全員参加で開催される「山彦デモプログラムコンテスト」のために開発されたロボットたち。
特に面白いのは、渡辺さんが最後に開発した「スニーキングボット」で、その名の通り、相手に気づかれないように、死角を考慮しながらスニーキング(尾行)するロボットだ。ちなみに渡辺さんはこのプログラムコンテストで出場6回中、5回優勝している。
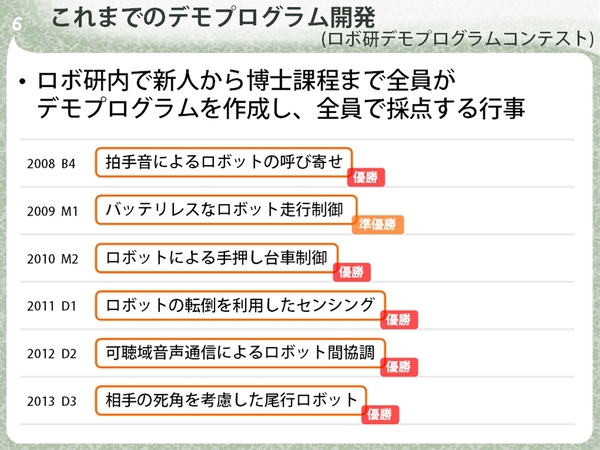
渡辺さんの山彦デモプログラムコンテストの実績一覧。6回中5回優勝しており、優勝できなかった年も準優勝
渡辺さんが2013年に開発した「相手の死角を考慮した尾行ロボット(スニーキングボット)のデモンストレーションを収めた動画
―― 渡辺さんがこれまでに手がけてきた研究テーマについて、教えて下さい。
渡辺 「研究自体は、制御とか計測が中心です。ロボットの動く軌跡やモーターを、うまく、効率よく制御する、センサーをもっと高精度にするとかですね。
こういったものを専門でやっている人は、数式で綺麗に解こうとしがちなのですが、問題が複雑になると極端に難しくなるので、近似して綺麗に解くんですね。そうするとどうしても、欲しい性能を完全には出せません。
今はコンピューティング能力を駆使して、なんでも計算してしまおうというのが流行っていますけど、それを利用して、そういった計測や制御を総当たり的に計算して全部解き、一番良いパラメーターを見つけようというようなことをやっていました。博士論文の制作時も含めて、パワーのあるマシンが手放せない感じです」

大学の研究室とは思えないほど片付いているが、これでも年度末で掃除が行き届いていない状態なのだとか

ロボットに不可欠のバッテリーは集中管理されている
―― 計算やシミュレーションだけでなく、実際に動くロボットもたくさん開発されてますよね。
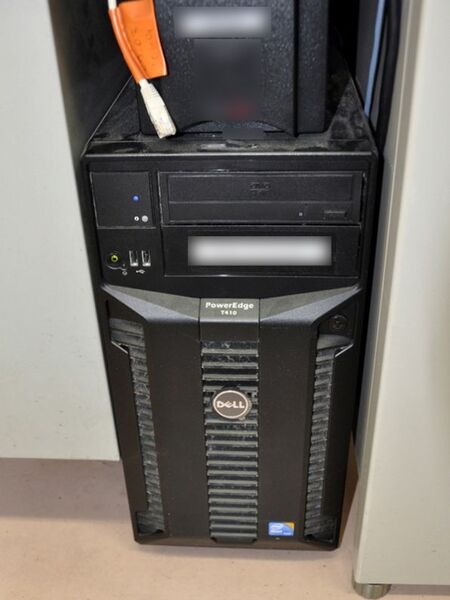
渡辺さんが計算に使っていた、デルのタワーサーバ「PowerEdge T410」
渡辺 「はい、つくばチャレンジという、TXつくば駅周辺の公道をロボットが自律で移動するというチャレンジがあるのですが、それに出場するロボットを作ったり、研究室内でロボットを動かすためのソフトウェアプラットフォームも開発しました。
あと、ロボットがぶつかったときにそれを検出するバンパーセンサーとか。
最近は茨城県内の中小企業と共同プロジェクトを立ち上げて、モーターを駆動するための基板であるモータードライバなどの開発を担当して、商品化しました。
このモータードライバは、基板パターンも私が設計しています」
研究室に配属された学生に一人一台与えられる移動ロボットプラットフォーム。大人が軽く抱えられる程度のサイズ

知能ロボット研究室が蓄えてきた移動ロボットの基盤技術を、茨城県内や周辺の中小企業に技術移転することを目的として立ち上げられた「T-frog Project」
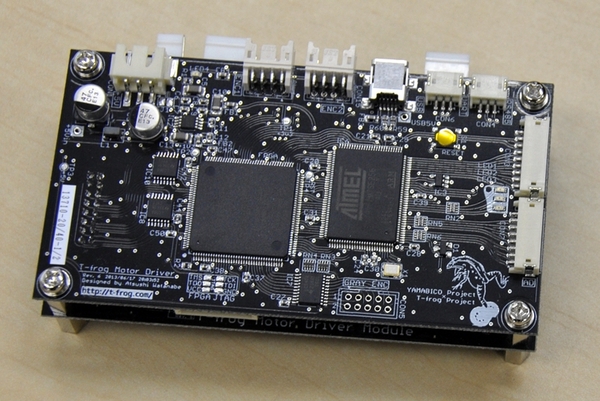
そのT-frog Projectで、渡辺さんが中心となって開発したモータードライバ「TF-2MD3-R6」。プロジェクト名にちなみ、基板右下には鳥獣戯画の蛙をあしらったマークが見える
―― 研究室は移動ロボットに特化していますね。
渡辺 「そうですね。研究室自体は完全に移動ロボット特化です」
―― ヒューマノイドとかはやっていらっしゃらないですよね。
渡辺 「その辺は全くやっていません。ただ、移動ロボットと人間の関わりは、結構意識しています。直接、人間とインタラクションするというところから、さらに、ロボットがなくなって、人間にセンサーをつけて人間を動かすとか、そのような方向性もあります。視覚の補助などがそれにあたります」
―― つくばチャレンジの参加ロボットも特徴的でした。
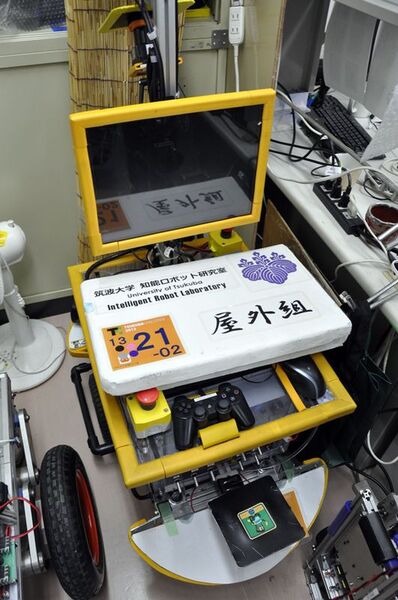
つくばチャレンジではこのような走行ロボットが何台も参加する
渡辺 「つくばチャレンジは、つくば駅前の公道で、人が歩いている最中に開催されるのですが、他のチームは大抵、あらかじめコースを手動でコントロールして走らせ、周りのセンサーデータを全部取ってきて、それを元に走るのですが、私たちのチームはセンサーデータを現場で取得せず、Google Map上に書いた地図のみで走るという挑戦をしていました」
―― それはかなり難しいですよね。
渡辺 「そうですね。完走はできなかったのですが、1km程度ならきちんと走れるという結果になりました。あとで、ここの廊下を走れるように地図を作り直したものをお見せしたいと思います。
研究自体は地味だけれども重要な根本の部分をやってたんですけども、デモプログラムコンテストでは、人間とインタラクションをとるとか、見た目が面白いとか、そういうのを意識して作っています。
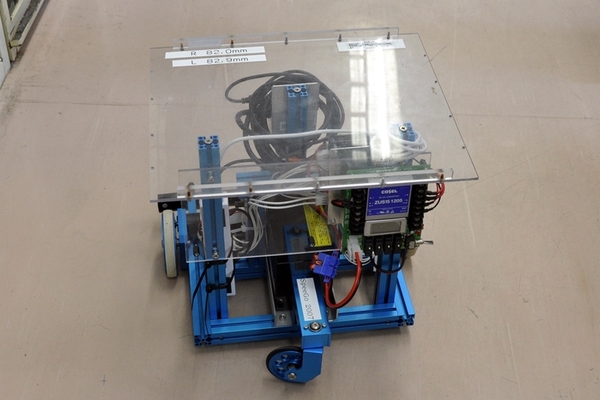
例えば、2011年のコンテストに出したエクストリーム・センシングは、本当は起こってはいけない転倒動作をうまく使って、本来は水平しか検出できないレーザーレンジセンサーを下に向かせて、下に落ちているものを検出しています。ロボットをわざと倒れかけるようにして、その瞬間に見るということをやっています。
渡辺さんが2011年に開発した「エクストリーム・センシングロボット」
―― 確かにこれはエクストリームですね。
渡辺 「最初にカタンと倒れ掛かり、みんなが「あっ!」と言った瞬間に『これは優勝したな』と思いました(笑)」
本記事はアフィリエイトプログラムによる収益を得ている場合があります
この連載の記事
-
第3回
デジタル
Gのレコンギスタの舞台“宇宙エレベーター”に惚れ込んだ男 -
第2回
デジタル
海外と日本でクラウドファンディングに成功した「RAPIRO」の秘密 - この連載の一覧へ
")


































で240Hz&0.03msという欲張り4Kゲーミングディスプレーが至高の逸品すぎた")












