使用者と一緒に歩む! 歩行支援ロボット「WALK-MATE」(後編)

この記事は、国土交通省による歩行空間データの活用を推進する「バリアフリー・ナビプロジェクト」(https://www.barrierfreenavi.go.jp/)に掲載されている記事の転載です。
パワーではなくリズムで歩行をアシストするというサポートロボット「WALK-MATE」。その性能や仕組みを取材した前回に引き続き、今回は開発の中心人物にインタビュー!
WALK-MATEの開発背景
私たちが快適な歩行空間を作り出すうえで基礎となるのは、しっかりとした歩行が可能であるということです。その歩行そのものが高齢や病気などにより困難である人に対して、リズムを取ることで歩行をサポートをする「WALK-MATE」。その機能などについては前回の記事でお伝えしました。
この「WALK-MATE」は、東京工業大学(東工大)発のベンチャー企業であるWALK-MATE LABが開発し、すでに商品化されて発売中のもの。その開発は1990年代にまで遡ります。
開発の中心人物である東工大の三宅美博教授は東京大学の薬学部出身で、当時は生物物理学を専攻し粘菌を主な研究テーマとしていました。そこで粘菌の情報処理にはリズムが用いられていることを発見。その“リズム同調”というものが人間にも備わっており、それが歩行困難な人の歩行アシストに使えるのでは?との考えに至ったそうです。
WALK-MATE LABの最高技術責任者である三宅美博教授は、薬学博士という異色の経歴をもつ。
当時、1990年代の高齢者介護の主流である、「ベッドで寝ている高齢者をまわりが至れり尽くせりで介護する」という考え方を疑問視していた三宅教授は、「何でも助けることが幸せな老後ではなく、最後まで自分の脚で歩き、買い物に行けるような社会とつながる老後が理想なのではないか?」と考えて「WALK-MATE」の開発をスタート。そこから現在の形に至るまでの開発の道のりなどを三宅教授にお聞きしました。
“リズム同調”で人とロボットがつながる「WALK-MATE」
「このロボットをひと言で表すなら、“人間と「間」を合わせて歩いてくれるロボット”です。
我々は、歩行は社会的なもので、人と人とのつながりの中で生まれてくるものだと考えています。そして、その人と人、人とロボットをつなぐキーワードが“間が合う”ということです。間が合うと言うのは、ロボットだけが良くても、人だけが良くてもダメで、お互いに歩み寄ることが大事です。歩み寄るなかでその関係が刻々と変化していく、それをどうやれば適切なものにできるのか? こういう考え方でやっているのが僕らのロボットです」

“人間と「間」を合わせて歩いてくれるロボット”を開発している東工大の三宅美博教授。
「普通、歩行アシストロボットというと皆さんパワーアシストを考えると思うんですけど、僕らはリズムに注目をしています。リズムというのは実は人と人をつなぐ力があるんです。
人と人とが、並んで歩いていると自然と歩調が合うじゃないですか。でもこれって当たり前のようでいて不思議だと思いませんか? 考えなくても歩調がそろう。これが僕らの体が持っている自然と人とつながる力であると考えています。これの面白いところはがんばらなくてもできるところです。僕らの体というのはそういう仕組みを自ずと持っているんです。その性質をロボットの中に入れれば、無理せず人と合わせられると考えたんです」

リハビリの現場でも患者と、サポートするセラピストの歩調があっているのをよく見かける。
「よくあるのが、人ががんばってロボットに合わせる。あるいは、賢いロボットだと人が何もせずにロボットが全部やる。でもそういうものではない。お互いに歩み寄るなかで、歩行という運動を一緒に創っていくわけです。その仕組みをロボットに入れたい! それが僕らの基本的な考え方です。
いきなりすべてはできないので、最初はタイミング、つまり「間」をうまく合わせていこうとしました。僕らのロボットが「間」を合わせていくだけで、いろんな効果が出てくるんですけども、例えば不安定なフラフラしていた歩行が、「間」を合わせるだけで安定してきたり、あるいはリハビリ的な効果が促進されたりするんです。あと「間」を合わせると一体感が出てくるので安心感も生まれます。
ここ10年ぐらいはメカとしてのロボット作っていますが、最初はそうじゃなかったんです。「リズム」とか「間」が合うことを目指していたので、最初に使ったのは「音」です。うまく「間」を合わせる音を、歩行が困難な人に聞かせることで歩行を安定化させることをしていました。それの効果が顕著にみられてきて、それでロボットの機械を一緒に作ってくれるって人が現れて、現在に至ると言う感じです」
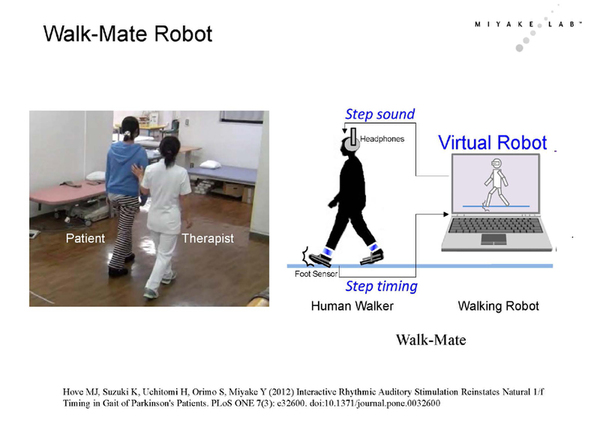
ヘッドホンで音を聞いて歩行をアシストする初期のモデル。これでもじゅうぶんな効果があったとのこと。
歩行の「間」を取る仕組みとは ?
「僕らのやっている「間」の技術っていうのは、本人が気付かないように知らぬ間にリズムを微妙にずらして、早く歩いたり遅く歩いたり、バランスを変えて、よい方向に導いていく。そういうことをやる技術です。
もともとは、東大の薬学部で粘菌の研究をしていた時に、粘菌の情報処理にリズムが用いられていて、それぞれのリズムが同調していく仕組みを発見した頃から始まります。どうやって粘菌が個体としての意思決定をしているのか? 全体としてまとまって動けるのか?っていう研究をしていたんですけども、その現象のモデルが割とそのまま人に使える感じだったんです」

「開発のヒントは粘菌の研究にあった」と語る三宅教授。
「人間の中にはリズムを生成するCPG(セントラル・パターン・ジェネレータ)という神経回路があるんです。このCPGが歩くことやそれ以外のリズム運動を作っています。これと同様に、まず歩くのが不自由な人のリズムを、装着したWALK-MATEが解析。その解析した個人のリズムパターンを元に、少しだけ良い歩行パターンの方向にずらしたものを、リハビリしている人にモーターでアシストしつつ、フィードバックするという仕組みです」
WALK-MATEを装着した感覚とは?
「先程も申し上げたとおり、1990年代中盤は音だけのモデルを開発していました。音でリズムを取るといえば、メトロノームじゃないですか? でもメトロノームのように一定のテンポの音に合わせて歩くのはリハビリとしてはちょっと無理があるんですよ。ロボットと人、それぞれに合わす仕組みとずらす仕組み。それがあって、初めてリハビリにも使えるようになったわけです。
これは当時の音だけでサポートするモデルでの実験データなんですけども、ロボットと人間の歩行周期の時間変化のグラフがお互いに歩み寄ってきて、その二者間の揺らぎが小さくなっていき、ひとつにまとまる方向に安定してくるんです。その後に音を止めると、また揺らぎが出てくるんですが、最初に比べると人間の揺らぎが少なく、安定したパターンで歩行できるようになるんです」
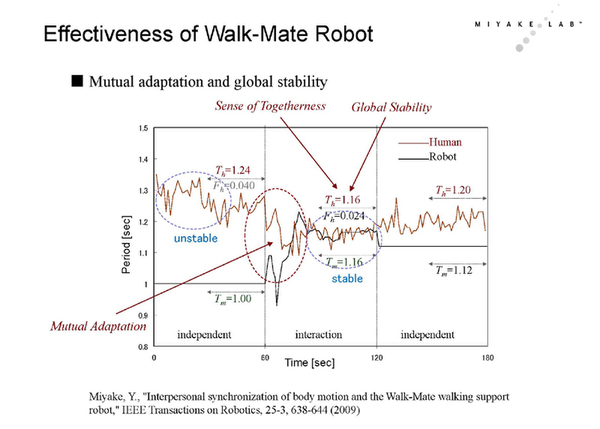
最初はふたつにわかれていたロボットと人の歩行パターンがやがて同期し、ロボットを外したあとも適切な歩行に近いパターンで歩けている。
「これは三次元で歩行データを計測できる「WM GAIT CHECKER」で、「WALK-MATE ROBOT」装着時のアシストと非アシストの比較、および、ロボット装着前とロボットを外した後の比較における歩行を可視化したグラフです。ロボットを身に着けると足がより高く上がって、リズミカルになっているというのが見て取れます。この効果はロボットを外した後も残り、やればやるほど蓄積してゆき持続時間も長くなるというデータが出ています。歩行に必要な身体と脳とのつながりを改善し再生していくのです」
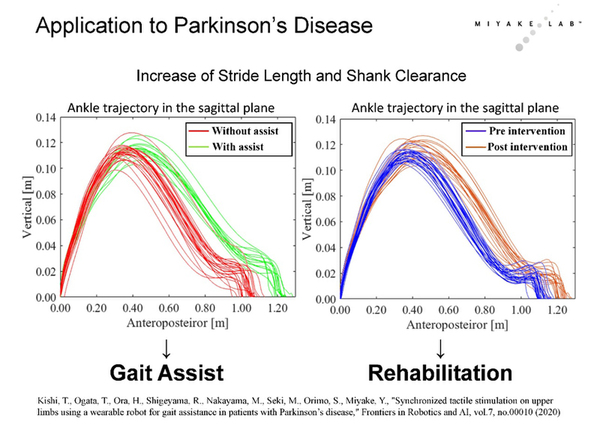
パーキンソン病患者のリハビリに使用したところ大きな改善が見られた。
「パーキンソン病の症状に、“すくみ足”という歩行時に向きを変える際に足が動かなくなる症状があるんです。ロボットを装着し「間」を合わせるとこれがスムーズになります。この動画の方はリハビリを20分程度やって、1〜2週間ほどのあいだロボット無しでもスムーズな歩行ができるようになっていました。
さらに、今やっているのはARを使ったシステムです。これは、ヘッドマウントディスプレイの中に3Dスキャンした自分のアバターが表示され、その自分を前に見ながら後ろから一緒に歩くというシステムです。こちらはリハビリだけでなく、いろいろなスポーツやレジャー向けとしても展開する可能性がある技術だと思っています」
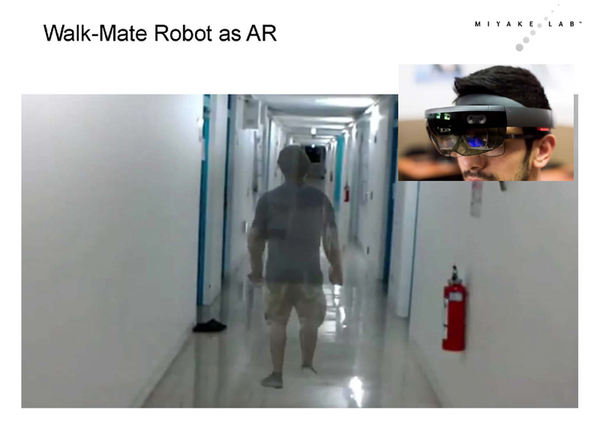



新たに開発中なのがARを使った歩行アシストシステム。
「WALK-MATE」と「同行二人」の関係
「僕らの「WALK-MATE」がお遍路さんを選んだかというと、この同行二人ということなんですよ。同行二人とは、弘法大師と一緒に歩くということなんです。お遍路さんは1人で歩いてるじゃないですか、でもあれって実は弘法大師と一緒に歩くという意味があるんです」

「弘法大師と共に歩くお遍路さんのような、使用者と共に歩むロボットスーツを目指したい」という三宅教授。

昨年12月に香川県で実証実験が行なわれた。
「これが、我々の考え方と非常に近いんです。我々のロボットや会社名としている「WALK-MATE」って、考えてみれば「同行二人」って気がしませんか? 私が香川県出身ということもあり、昔からこの「同行二人」という言葉や文化が好きでした。それもあって1998年頃に「WALK-MATE」と命名したんです。
それが、昨年末に弘法大師が生まれた善通寺の管長さんが、我々のロボットに「同行二人」という名前を付けてくれたんです。世界広しといえどもこんな名前を付けているロボットはウチだけだと思います(笑)。まさに「同行二人」の英語訳が「WALK-MATE」っていう名前そのもので、僕らの基本的な考え方を具現化したものになりました」


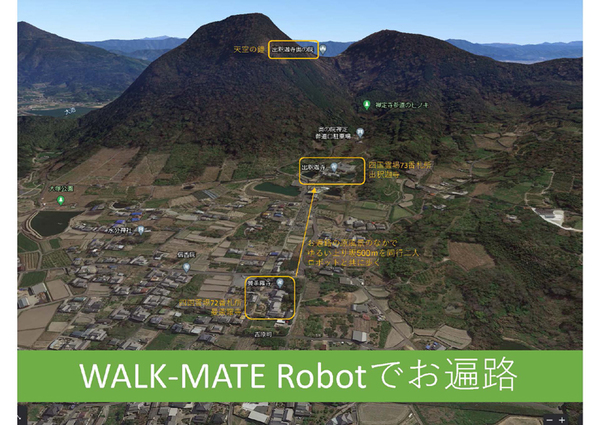
善通寺の管長から「同行二人ロボット」に任命され、お遍路の700mの坂道で「WALK-MATE」を使って実証実験が行なわれた。
「今後の「WALK-MATE」の活躍の場は医療やリハビリの現場から、ヘルスツーリズムや高齢者の健康といった領域に拡がっていくと思います。高齢になって足腰が弱って、転ぶのが怖くなって、外出がおっくうになる。そういった方が積極に外に出るためのツールとして使ってほしい。最初に申し上げたように、高齢者がいつまでも“社会参加できるための道具”を僕らは作ろうとがんばっています。まだまだ道半ばですが、そういう考えでこの「WALK-MATE」に取り組んでいます」