




遠隔操作型ロボットの精密な操作を実現するためのテクノロジーを提供するR2(アールツー)。リアルタイムなビデオ伝送と遠隔操作を実現するR2のWebRTC製品が、いよいよ日本でも利用可能になる。R2 代表取締役の李赫(イヘギ)氏に、テクノロジーと製品の概要について聞いた。(インタビュアー ASCII編集部 大谷イビサ)

R2 代表取締役の李赫(イヘギ)氏
遠隔操作型ロボットの操作に必要な技術とは?
社会課題の解決において、遠隔操作型ロボットの利用が現実味を帯びるようになってきている。遠隔操作型ロボットの場合、センサーやアクチュエーターを操作するのはあくまで人間なので、いわばラジコンと同じだ。AIのテクノロジーが発展したことで、昨今はロボットと言っても自律型ロボットに注目が集まりがちだが、現時点では人間自体が操作する遠隔操作型ロボットの方が課題解決の近道になることは多い。特に日本では災害や事故現場の作業で遠隔操作ロボットが活用されることも増え、障がい者が遠隔で操作できるオリィの「OriHime(オリヒメ)」もよくメディアを賑わせている。今後は遠隔運転、リモート手術など実用化は進んでいきそうだ。
しかし、人間がロボットのセンサーから視覚や聴覚の情報を得て、アクチュエーターを思い通りに操作するためには、リアルタイムな通信技術が大前提となる。たとえば、リモートでの手術や運転において、ビデオが乱れたり、ロボットの操作が遅れたりすれば、たちまち事故につながる。こうしたロボットに必要なビデオ伝送と遠隔操作を可能にするリアルタイム通信を提供するのが今回紹介するR2(アールツー)になる。
R2は文字通りRemote Roboticsを意味しており、低遅延のリアルタイム通信技術を提供する。「たとえば、東京本社にいながら、ソウルの研究室にある機材を使ってリモートで実験するような場合、必要になるのは精密な操作。そのためにはリアルタイムな映像の送受信と遠隔操作の技術が必要です」とR2 代表取締役の李赫(イヘギ)氏は指摘する。
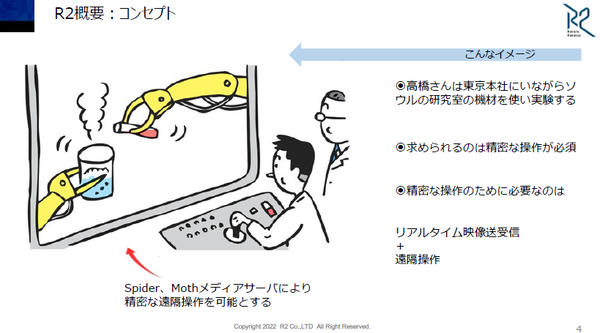
R2のテクノロジーイメージ
その点、R2のテクノロジーを用いれば、遠隔操作型ロボットやラジコン、ドローンはもちろん、スマートカメラやデスクフォンなどInternet of Video Thingsと呼ばれるデバイスでも低遅延で安定した通信を実現する。実際、ロボットを遠隔操作する動画を見せてもらったが、インターネット経由で通信しているとは思えないリアルタイムな動作に驚かされた。
R2のWebRTC製品群で実現する超低遅延通信の世界
R2が提供するのは低遅延なリアルタイム通信を実現するためのWebRTCテクノロジーだ。WebRTCとはWeb Real-Time Communicationsを指しており、Webブラウザ同士がプラグインなど別のソフトウェアを用いることなくP2P通信を行なうことで、1秒以下の低遅延な通信を実現する技術を指す。複数のコーデック、通信プロトコル、APIから構成されており、現在はおもにWeb会議サービスで用いられている。
R2のWebRTCサーバーの「Spider」、Agile RTCサーバーの「Moth」、そしてメディアサーバーの「Beetle」などは、Web会議や動画配信ではなく、遠隔操作型ロボットを含むIoTデバイスでの利用を前提としているのが特徴だ。韓国発のR2のテクノロジーは現代自動車や航空大学、KT(コリアンテレコム)などで採用され、自動運転やドローンの実証実験で用いられている。特許登録が4件、特許出願も2件となっており、技術的にも折り紙付きだ。
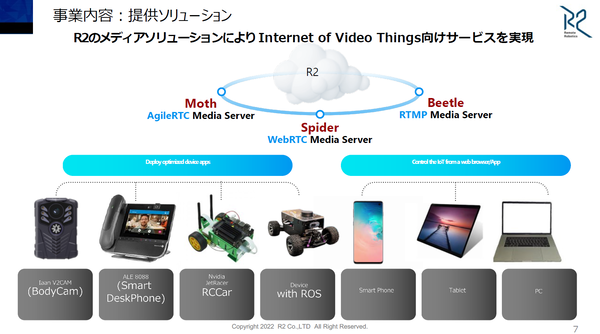
R2のメディアソリューション
Spiderは高品質なビデオを伝送するWeb RTCサーバーとして、インターネットの標準プロトコル(SDP、UDP、RTP、SCTP)やコーデック(H.264、VP8、Opus)を用いた低遅延伝送を実現する。デバイスはIoTデバイスとしてメジャーなRasberryPi 3やJetson Nanoに対応。P2P通信で必要なWebRTCのサーバーとクライアントが一体化されているため、IoTで多いプアなスペックのデバイスでも200~500ms(ミリセカンド)という低遅延での通信が可能になっている。
一方のMothはAgile RTCを謳っており、独自開発したSSSP(Simple,Stupid Streaming Protocol)を用いることで、Spiderよりもさらに低い100msという超低遅延を実現する。また、組み込み機器で用いるESP32インターフェイスにも対応しており、幅広いデバイスでも利用できるのも特徴だ。「今後増えていくIoTデバイスから低価格なインターフェイスで高品質なビデオ伝送が実現できます」と李赫(イヘギ) 氏は語る。
R2が他社サービスに比べても圧倒的に低い遅延を実現しているのは、イメージファイルの生成、圧縮やパケット化などメディアの送受信の全行程を最適化しているからだ。標準化されたWebRTCの技術と同社独自の技術を組み合わせ、1秒以下のレイテンシでメディア伝送を配信することが可能になる。また、複数ユーザーが共同でロボットを遠隔操作するため、操作権限をユーザーごとに付与する技術も特徴。さらに、複雑なWebRTCの仕組みをシンプル化し、操作をすべてAPI経由で行なえるため、さまざまな製品やサービスから容易に利用できる。
低スペックのIoTデバイスであっても、リアルタイムなビデオ伝送や遠隔操作を実現できるのはR2の大きな売り。「5Gや6Gでも低遅延化は進んでいるのですが、低スペックなIoTデバイスからビデオを送受信するためには、通信環境のみならず、デバイス側でも遅延を減らす工夫が必要。われわれはそこに着目しています」と李赫(イヘギ)氏は語る。
5Gのショーケース、火星の探査ロボットイベントなどを展開
R2が日本展開において今後計画しているのは、京セラグループのKCCSモバイルエンジニアリング(KCME)とタッグを組んだ5Gラボ内のリアルタイム遠隔操作環境構築だ。ここでは5Gのショーケースの1つとしてロボット(RCCar)の遠隔操作をデモとして展示する予定で、この中でSpiderサーバーを用いられている
また、火星の探査ロボットをイメージにした「Hello Mars Japan」というイベントも開催される。今年韓国で開催されたイベントの日本版として都内で開催される見込みで、参加者はR2の技術を用いた探査ロボットを作成し、レースを競う大会だ。
韓国で11月に行なわれたHELLO MARS 2021
将来的にはロボット・プログラミング教室と連携した教育での需要にも応えていく。こうした技術と、SpiderやMothなどのサーバーを用いたリアルタイムな遠隔操作を活用したストリーミングロボットのラジコンカーコースを創設していきたいという。「自分が作ったロボットの操作権を他のプレイヤーと共有したり、販売するようなフレームワークを来年は展開していく予定です。子供たちにロボット操作の世界を体験してもらいたい」と李赫(イヘギ) 氏は語る。
そしてR2は、ソリューションのライセンス販売や開発支援を日本で提供していくことを発表した。「たとえば、自動車、ドローン、農機具、ラジコンなどのリモートでの運転、遠隔医療や実験などビデオを見ながら精密な操作を行なうニーズに応えられると思います」と李赫(イヘギ) 氏はアピールした。ロボットやIoTにフォーカスした通信というエッジの効いたテクノロジーが、日本のものづくりとどのようなシナジーを生み出すのか、今後が楽しみだ。
(提供:R2)
本記事はアフィリエイトプログラムによる収益を得ている場合があります



