異能な人列伝 第5回
「SIGGRAPH2018」にも参加! 移動体としてのロボットの形を鋭意模索中。
東大で、歩くドローンを開発した前川和純氏に開発秘話を聞いてきました。
2018年07月19日 17時00分更新

総務省が実施する独創的な人向け特別枠「異能(Inno)vation」プログラムが平成30年度の応募を現在受付中(応募締切は2018年7月20日の18時まで)だ。この異能vationにちなんだ、世の中の “異能” な才能を見つけ出してご紹介する連載「異能な人列伝」第5回は、前回登場いただいた、東京大学先端科学技術研究センター・稲見昌彦教授のもとで学んでいる前川和純氏(東京大学大学院工学系研究科先端学際工学専攻)に話を聞いた。
前川氏は東京大学機械工学部を卒業後、山中俊治研究室で修士号を取得。そのとき製作した、機械学習によって2足歩行を獲得したドローン「Aerial-Biped」が注目を集める、若手研究者だ。Aerial-Bipedは今年6月8日~17日まで東京大学生産技術研究所で開催された「Parametric Move 動きをうごかす展」に展示。さらに今年8月にバンクーバーで開催されるCGの国際学会「SIGGRAPH2018」にも採択されている。

Aerial-Biped
アプローチを変えることで、見たことのないロボットを開発
―― 変わった形のドローンですが、ドローンの詳細について教えてください。また、なぜこの形のドローンをつくろうと思ったのですか。
前川和純氏(以下、前川) Aerial-Bipedはドローンを使った2足歩行ロボットです。通常、歩行ロボットはバランスをとるのが大変なのですが、Aerial-Bipedは上半身をドローンにすることで、下半身がバランスを取ることから解放され、2本足で自由に表現できるロボットになっています。
Aerial-Bipedをつくった理由について言うと、元々歩くロボットをつくりたいと思っていたからです。ヒューマノイドを頑張るという方向性もあったのですが、それには結構大変さを感じていて、またコスト的にも自分が出せる限界があります。そこから違うアプローチで歩行ロボットをつくることを考えました。
外的な要因として、風船とドローンを使うことを思いつき、最終的にはドローンを使うことを決めました。
―― 足はつくるけど、足に歩く機能はいらないというのは最初からお考えだったのでしょうか。
前川 そこがポイントですね。歩くように見えるのが重要で、そうすることで違う道にいけるんじゃないかなという話を山中先生としていました。
ですから最初から考えていたのですが、最終的な実装に至るまで結構時間がかかっています。今の形のものを作り出したのは発案から約1年。学習を使って動きを生成するのを含めると、1年以上かかっています。
―― アプローチが逆なのがいいですね。そういうところから新しいものが生まれそうじゃないですか。苦労されたこととかありますか。
前川 本来、移動という目的に対して出てくる歩く動作を、移動が目的ではないところで、歩くように見せる点ですね。そこをどうやったらうまく表現できるか。最終的には強化学習を使っています。
歩いている動作は、接地する足先の速度がゼロになります。これが1つポイントだなと思っていて、それを達成するように学習させると、歩いている動きが生成されました。
強化学習を使うことによって、自分が操作したドローンの動きに対して、歩いているような動きを自動で生成してくれます。速度に対して、インタラクティブに生成が可能となります。
――「メカモン(MekaMon)」って知っていますか? イギリスのリーチ・ロボティクス社がつくった、多脚ロボットのおもちゃです。ドローン並みの制御をしていて、戦わしたりして遊びます。おもちゃになるといいですね。たとえば人型も可能なのですか。
前川 重いものがぶら下がるので大変なのですが、本質的には人型もほとんど違いはないと思っています。そこは外観設計の問題かなと。

「異能(Inno)vation、関心ありますね」と話す前川和純氏。
美しいと言われるロボットをつくりたい
―― 今後はどういうものをつくりたいですか。
前川 抽象的な目的ですけど、やっぱり見た人に「きれい」と言わせたい。あとは個性などを反映できるような歩行ロボットになってくると誰も見たことがないかなと思っています。今、自動生成で足の動きを出していますが、人がダンスする動きといった目的のある動作に対して、どういう起動を描くべきか、その辺を開発しようとしています。
―― もともと美しさに関心があったのですか。
前川 はい。絵を描くのが好きだったので、デザインに興味がありました。車メーカーのスタイリングデザインにインターンに行ったこともあります。
でも、美しいって何ですかね。人間にとって歩くのは簡単じゃないですか。なのに今の技術ではまだまだ、遠い。
またAerial-Bipedとは別のものですが、Preferred Networksでインターンしていて、「Walk」という作品を共同で製作しました。
通常の機械はすべてが規格化されたパーツでてきていて、人が設計して動きを与える形になっています。「Walk」はイレギュラーな物体、一つとして同じ形がない自然物を用いてロボットを構成するにはどうすればいいかということをテーマにしたプロジェクトです。
ひろってきた枝を3Dでスキャニングして、ロボットのモデルをその場でつくって、その場で学習させて、その場で使えるようなロボットをつくれないかというのが最終的なゴールでした。実際に強化学習をしていて、前に進むことができます。
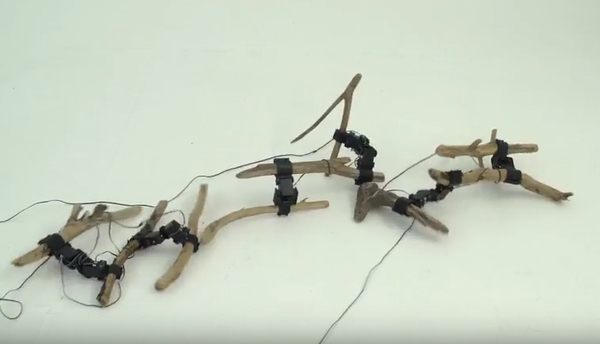
拾ってきた枝を組み合わせてつくられた「Walk」
―― 歩く動きにこだわっているわけではないんですね。
前川 どちらかというと、ロコモーションというか移動体であることが重要かなと思っています。今、その研究のために博士課程にいるみたいなところがあります。あと関心があるのは、テレイグジスタンス(Telexistence:遠隔存在感)ですかね。
【ここで指導教授である、稲見昌彦氏が登場】
稲見 歩行はテレイグジスタンスが難しいんです。映画『パシフィック・リム』のようなインタフェースはとても難しい。全体のダイナミクスが同じ系だったら、きれいにできるのですが、人とロボットは重心配置も違うし、アクチュエータの強さも全然違う。テレイグジスタンスやテレプレゼンス(Telepresence:遠隔臨場感)の研究で、足がない理由はいつもそれなんです。ダンスのステップとか遠隔ロボットに伝えたりするのは不可能ですよ。
また、サイズも問題になります。巨人はずっしんずっしんと歩いて、小さい生き物はちょこまか歩きますよね。今、つくっているものが表現として最適なサイズなのかも含めて、まだ検討する余地があるのではないかなと思います。
前川 全く同じ力の強さで関節配置も同じならできるんですけどね。
―― Aerial-Bipedのように足といいながら、体重を支えない足ならできますよね。
前川 エンドエフェクターとしての足ではなくて、ディスプレイとしての足だったということですね。究極に言うと、足は飾りです。
―― ジオングみたいな話ですね。今日はありがとうございました。さらなるご活躍を期待しています。
平成30年度・異能(Inno)vationプログラム
詳細情報、応募は公式サイトをご確認ください。
総務省がICT(情報通信技術)分野において、失敗を恐れず破壊的価値を創造する、奇想天外でアンビシャスな技術課題への挑戦を支援する異能vationプログラム。平成30年度は下記の2部門で公募を受け付けています。
両部門とも平成30年度の応募締切は、2018年7月20日(金)まで。また全国で公募説明会を開催中です。詳しい情報は、異能vationの公式サイト http://inno.go.jp/ をご確認ください。

本記事はアフィリエイトプログラムによる収益を得ている場合があります
この連載の記事
-
第6回
プログラミング+
産総研/ニコニコ学会β交流協会会長の江渡⽒に「どうすればイノベーションは加速するのか」を真剣に教わってきました -
第4回
プログラミング+
東京大学先端科学技術研究センター教授の稲見昌彦氏に、最近考えていることを聞いてきました。 -
第3回
ビジネス
ホロラボ中村氏にHoloLensと複合現実から見える“未来”を聞いてみた -
第2回
ビジネス
人工知能学者・坂本真樹氏の夢は「オノマトペで世界を平和的に征服」!? -
第1回
ビジネス
“mstdn.jp” ぬるかる氏のエンジニア的ルーツを辿る -
プログラミング+
異能な人列伝<目次> - この連載の一覧へ






&アスペクト比77:36って聞きなじみないけど使いやすいの?")

とBTO PCならではの特注PCパーツに大興奮")

















ゲーミングディスプレー、200Hz・1ms・昇降式多機能スタンドで3万2980円は断然買いでしょう")
