




屈筋と伸筋を組み合わせて人工関節を駆動する
東京大学は10月24日、立体的に培養して作成した筋肉を人工関節にセットして連続して駆動することに世界で初めて成功したと発表した。
これまで、培養した筋肉細胞に電気刺激を与えることで動作させることはできていたが、短時間で組織が硬直して動かなくなってしまうという問題があった。
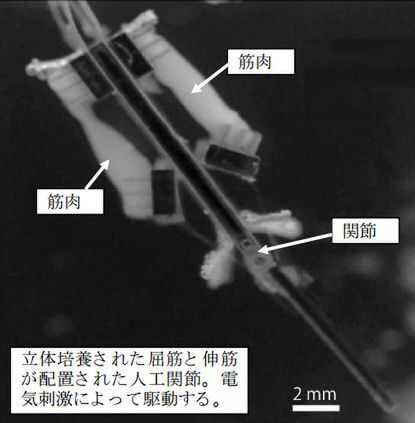
東京大学生産技術研究所の研究グループは、ハイドロゲルシート内に筋肉細胞を培養、一定方向に配向した筋繊維からなる立体筋肉組織を作成する手法を確立。この筋肉を屈筋(腕などを曲げるときに使う筋肉)と伸筋(伸ばすときに使う筋肉)として対となる拮抗構造で人工関節に取り付けることにより、組織が硬直せず持続的に動作するようにした。
持続的に動作する筋立体組織として、動物を使わない薬物試験のモデルや、力学的な特性や制御メカニズムを探るモデルとして応用できる。さらに、研究グループではすでに筋肉と接合する神経細胞の立体的な組織培養にも成功しており、将来的にはより生体に近い構造を持つロボットの駆動機構としての可能性も見据えているという。




































