



産総研、専門知識なしで人間型ロボットの動作が組めるソフト「Choreonoid」開発
歌って踊れるようになった女性型ロボット「HRP-4C」
2010年10月20日 17時00分更新

統合ソフトウェア「Choreonoid」とは?
今回のデモはSAM氏の振り付けを中岡氏が何ヵ月も繰り返し見て、作り上げたものだ。その上で重要な役割を果たしたのが統合ソフトウェア「Choreonoid」である(今年度中には一般公開予定)。
産総研 知能システム研究部門 副研究部門長 兼 ヒューマノイド研究グループ 研究グループ長の横井一仁氏は「ハードウェアだけではなく、多様なコンテンツを手軽に作ることのできるソフトウェアが非常に重要」と会見で語った。

独立行政法人産業技術総合研究所 知能システム研究部門 副研究部門長 兼 ヒューマノイド研究グループ 研究グループ長 横井一仁氏
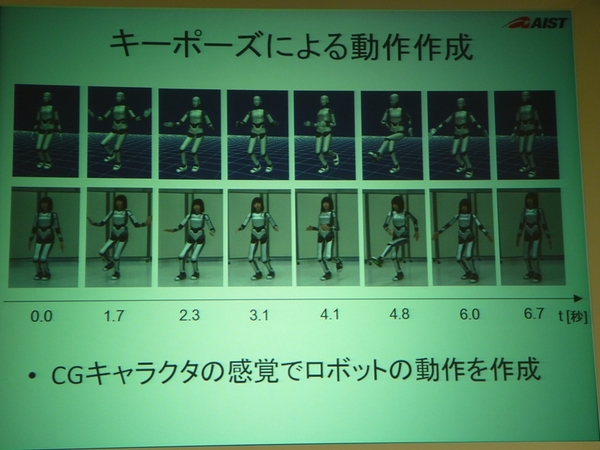
キーポーズを使って簡単に動作生成ができる「Choreonoid」
ヒューマノイドロボットの特徴は、人間型であるがゆえに、人間と同様の多様な振る舞いを表現できる点にある。そのためヒューマノイドにおいては、ロボットが動作をして振舞うことが、そのまま価値を持つ。
産総研が身長158cm、体重43kg、自由度42の女性型ロボット「HRP-4C」を「サイバネティックヒューマンHRP-4C」として発表したのは2009年3月16日。「未夢(ミーム)」という愛称もつけられた、リアルな頭部と日本人女性の平均体型を持つ人間型ロボットである。
「HRP-4C」を歌って踊れるようにすることは、昨年の「DCEXPO 2009」でのトークショーで発表されていた。
統合ソフトウェア「Choreonoid」はユーザーが任意のキーポーズを与え、それをつなぎ合わせることで一連の動作を構成する。名前は「Choreograph(振り付ける)」と「Humanoid(人間型ロボット)」を組み合わせた造語から名づけられた。ロボットの全身動作を直接作成・編集することができるソフトウェアだ。
従来のロボットの動作生成は、ロボット制御の知識を使って個別にプログラムを作成するか、モーションキャプチャーを使って取り込むしかなかった。いっぽう「Choreonoid」は、プログラミングのスキルや実演のスキルを必要とせず、大掛かりな装置を必要としない。
また、ロボットのための動作を直接作るので、ロボットの能力を最大限に活用できる利点があるという。
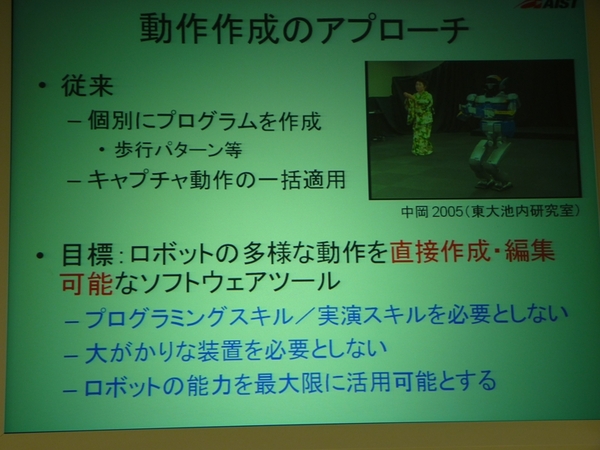
「Choreonoid」による動作作成アプローチ
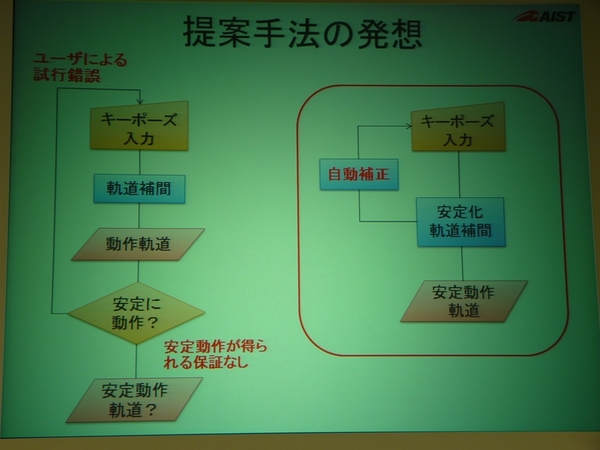
ロボットの動作を自動補正してくれるため試行錯誤の必要がない
だが物理空間で実体を動かすロボットはCGキャラクターとは異なる。関節トルクや速度、自由度にも限界があるし、関節の干渉や力学的なバランスの問題もあるため、キーポーズを単純につなぎ合わせるだけではバランスを崩して倒れてしまいかねない。
特に「HRP-4C」は足裏も小さいため力学的バランスを崩しやすく、小型ロボットと違って等身大であるため着地時の衝撃も大きい。そのためキーポーズを単純に繋ぎ合わせるだけでは安定動作させることはできない。
「Choreonoid」はユーザーがキーポーズの入力や修正を行う度に、自動的に、ロボットの動作が安定するようにポーズの補正やつなぎ合わせを自動で行なってくれる。
ユーザーが入力したキーポーズは、まず接地状態がチェックされる。足裏が地面にめり込んだり、接地すべき足が浮き上がっていたりしないよう、足裏を床面にフィッティングさせる補正が行なわれる。
次に接地状態を滑らかにするために、「ゼロモーメントポイント(ZMP/ロボットと床面の間に働く水平軸まわりのモーメントがゼロになる点。重心の位置を慣性力で補正した点を床面に射影した点で、足裏下にある必要がある)遷移」が決定され、そしてそこからロボットの各関節が空間で無理のない軌道を描くように「補間空間遷移」の決定が行なわれる。
これにより、足を大きく動かす動作が作りやすくなったという。なお補正の際には、ユーザーが与えたキーポーズだけではバランスがとれない場合は、補助的なキーポーズが自動的に挿入される。また、足裏の離反や着地をスムーズに行うための補助キーポーズも追加される。
このようにして得られたZMP遷移・補間空間遷移・キーポーズ列を統合的に処理することで、ロボットにとって安定な動作軌道を得られる。この結果はユーザーが入力したキーポーズにただちにフィードバックされ、必要に応じて各キーポーズの腰の位置が自動的に補正される。

SAM氏とHRP-4C
このような処理は、ユーザーがキーポーズの入力や修正を行う度に行われるため、ユーザーは自分の希望する動作が生成できているかを判断しながら動作を作成することができる。ロボットの動きの軌道を作ったあとに補正するのではなく、ZMP遷移と補完空間遷移を統合した形で処理することにより、リアルタイムの補正が可能になった。
「Choreonoid」を使うことでロボット制御プログラミングや動力学などの各種専門知識がなくても、ロボットの能力を最大限に活用した振る舞いを作成できるようになる。ただし、ロボットができない動きはやはり生成できない。たとえば足を伸ばした歩行を「Choreonoid」で振付けても、足を曲げた形に補正される。
産総研では、今後は「Choreonoid」を広く一般に公開し、さまざまなクリエイターとの共同により、人間型ロボットの新たなコンテンツ制作を行なっていき、より高度な動作の実現を目指す予定だとしている。対応OSはWindowsとLinuxで、公開予定は今年度中。フリーウェアとして公開される予定。
また、HRP-4Cの動作生成コンテストなどを行う予定も検討中だという。なお技術詳細は2010年10月18?22日に台北市で開催される国際会議「IEEE/RSJ International Conference on Intelligent Robots and Systems」で発表される。










が四角い地球を襲う!5月23日発売『デジボク地球防衛軍2(略)』の魅力をチェック")

















