




精度の高い敷設を実現する綿密な調査と計画
さて、きずな号のような海底ケーブル敷設船で特徴的なのは、当然ながらケーブル敷設のための設備である。これは単にケーブルを海底に下ろしていくという単純な作業ではなく、数m単位の緻密さを必要とする繊細な作業であることをまず理解してもらいたい。
海底ケーブルの敷設は、事前の調査などを踏まえた綿密な計画が必要になる。海底の起伏は激しいし、海底地震の起こりやすいところだと障害も起こりやすい。また、他の通信事業者が敷設したケーブルも多いので、こうした既設のケーブルへの影響も考えなければならない。いずれにせよ、陸揚げ局間の最短ルートでケーブルを単に下ろしているわけではなく、海底データベースや各社の既設ケーブルの状況などを総合的に鑑みて敷設ルートを決め、その計画との誤差をなるべく小さく作業するのがもっとも重要だ。調査と計画こそが精度の高いケーブル敷設を実現する鍵である。
精度の高いケーブル敷設を実現するため導入されているのが、「Mikaiシステム」と呼ばれる敷設支援システムだ。Mikaiシステムではまず敷設シミュレーションを行ないつつ、実際の敷設に際してはADCPという流速計で位置・速度・潮流などをモニタリングしながら、ケーブルの予測着底位置をリアルタイムに予測する。実測モニタリングによるシミュレーションにより、潮の流れや船の位置、ケーブルを送り出すスピードなどを最適化し、はじめて精度の高いケーブル敷設が実現するわけだ。

敷設シミュレーションと着底位置の予測などを行なう敷設支援システム「Mikaiシステム」
実際の海底ケーブル敷設は、船内に貯蔵されたケーブルタンクにケーブルを巻き付け、ドラム式のケーブルエンジンで送り出すという大がかりな作業になる。きずなにはケーブルタンクとケーブルエンジンが2基用意されており、「同時巻き上げ」や「片方で引っ張り、片方で送り出す」といった作業も可能だ。直径3.6mもある巨大なケーブルエンジンは、約27トンの巻上力でケーブルを制御するほか、DOHB(Draw Off Hold Back)という装置でケーブルをしっかりをグリップし、ドラムに巻き付けている。送ったり、引き上げたり、溜めたり、といった繊細な作業が可能で、精度の高い敷設を実現している。

3.6mのケーブルエンジンは2基用意されている
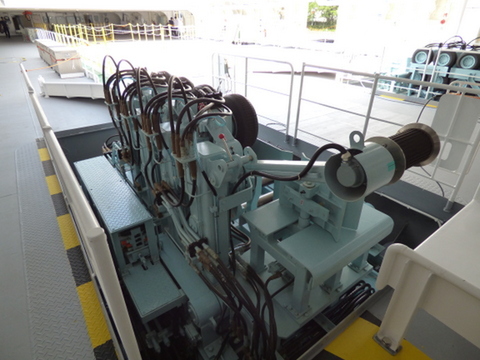
安定したケーブルエンジンへのまき付けをサポートするDOHB

ケーブルを巻き付けておく船内のケーブルタンク
海底ケーブルの埋設や取り出しを繊細かつ大胆に行なう水中ロボット
ケーブル自体は大型船の錨や漁場での底引き網で損傷しないよう、0.6~2m程度の深さに埋設される。通常は巨大なすきのような埋設機で敷設と同時に埋設されるが、敷設後に海底ケーブルの埋設したり、埋設された海底ケーブルを保守のために掘り出すのは「ROV」と呼ばれる水中ロボットが用いられる。
きずな号の「CARBIS-Ⅳ」は、8つのスラスターで海中を移動し、水深2500mまで潜ることができ、埋設に加えて、ケーブルの修理や海底調査など、さまざまな仕事をこなせる。下部にあるジェットソードで海水を噴射することで、海底ケーブルの埋設を行なったり、繊細な操作と力の必要な操作をこなす2つのマニピュレーターやグリッパー、ケーブルカッターなどを器用に用いてケーブルの修理などを行なう。

水中での作業を行なうロボット「CARBIS-Ⅳ」
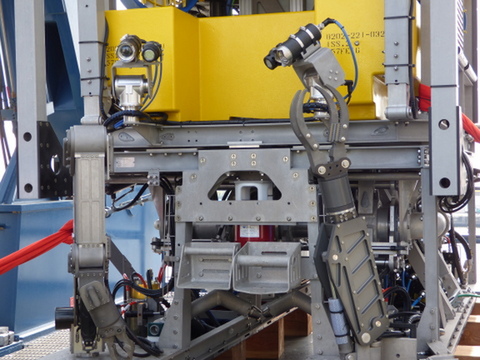
2つのマニュピュレーターを器用に動かす
操縦は船上の操作室から可能で、2台のカメラの視覚差を利用して奥行きを把握しながら作業が行なえる。高精度なソナーも用意されているため、海底で直接作業しているのと同じように操作できる。さらに見えない海底でも磁気センサーを用いて、海底に埋まっているケーブルを掘り起こして修理・交換するということも可能。耐用年齢25~30年くらいという海底ケーブルは保守や修理などの作業の方が重要になってくるため、今後もこうしたROVは大活躍することになるだろう。
本記事はアフィリエイトプログラムによる収益を得ている場合があります



