

Jetson Nanoという小型コンピューターにUbuntu 18.04を入れて、ROS Melodicを入れた。
Jetson NanoはNVIDIAが提供するパワフルな小型コンピューター。そこにUbuntuというOSを入れ、ロボット用のミドルウェアであるROSを入れたのだ。
●Ubuntu 16.04を入れる手段が見当たらない……
Jetson Nanoを使い始めたのは、Raspberry Piを使うことに限界を感じたからだ。
ノートPC(Let’snote)にUbuntu 16.04とROS Kineticを入れてオリジナルのウェアラブルロボットを動かしていた。
しかし、ノートPCからケーブルが出ているロボットはウェアラブルな感じがしない。そこでSBC(シングルボードコンピュータ)で動かせるようにして、SBCもウェアラブルにしようと考えた。
SBCといえば、でまず使い始めたのがRaspberry Pi(ラズパイ)だ。最新のRaspberry Pi 4 Model Bはメモリが8GBもある。8GBのラズパイを使ってみたくて、まずはRaspberry Pi 4 Model Bを使い始めた。
ラズパイ用のUbuntuが提供されているので、UbuntuのバージョンとROSのバージョンを照らし合わせて、インストールするバージョンを決めた。
そのときなぜか、最初にROS2を使おうと決めてしまった。ラズパイ4にもROS 2 Foxy にも対応しているUbuntu 20.04をインストールすることにした。
インストールしてチュートリアルまではやったものの、ROSで動かせていた過去の資産は使えない。今の技術力の自分にはそれはつらい。
そこで、ROS 2をアンインストールして、ROS Noeticをインストールすることにした。
しかしここで壁にぶち当たった。
過去の資産で「ar_track_alvar」というパッケージを使っていたのだが、なんとこれがROS Noeticでリリースされていない。このイシューを読むと、なんだか動きそうな、動かなそうな……。
vimで色々書き換えるなどやってみたが、私の技術力では無理だったので、サクッと諦めてRaspberry Pi 3 Model Bで試してみることにした。
大して考えずにRaspberry Pi 3 Model Bを買って、「まーUbuntu 16.04入れれば動くんじゃね?」とか考えていたのだが、買ってまず気づいた。
えっ、Ubuntu16.04をRaspberry Pi 3 Model Bに入れる手段なくね???
このページの、「Unofficial images」にRaspberry Pi 3 用のUbuntu 16.04のイメージへのリンクがあるのだが、開いてみると、えっ、「Not Found」じゃん??
色々な「ラズパイ3 Ubuntu 16.04 入れ方」的な感じで検索したHOW TOページも最終的には全てこのサイトからイメージをDLしている。イメージをDLする手段がない!!
うわーーどうしたらいいんだろ、ってなってたら、友人が助言をしてくれた。
「なんでラズパイ使ってるの??」と。
確かにラズパイ3で動いたとしても、メモリが足りず、重くてやってられない。過去にそれは経験している。スワップしたりはするのだが、快適な開発とは言い難い。
友人は、いくつかの選択肢を残してくれた。
その中の1つが、「Jetson Nano」だった。お値段も高すぎないし、やりたいことができそう。
行き当たりばったりもいいところだが、ついに上手くいきそうだ。
●Jetson Nanoを始める
購入したものは以下。
・NVIDIA Jetson Nano 開発者キット B01
・Jetson Nano用アルミケース Rev2
・ACアダプター 5V 4A
・Samsung EVO Plus 32GB microSDHC UHS-I U1 95MB/s
当時スイッチサイエンスにJetson Nanoの在庫がなかったので、Amazonで購入した。ケースはプラでなくアルミが良かったので、ケースだけスイッチサイエンスで購入している。
まずは、ケースの組み立てから。

開封の儀

ヒートシンク載っててかっこいい

開封したケース
足を装着

基板を付けるスペーサー
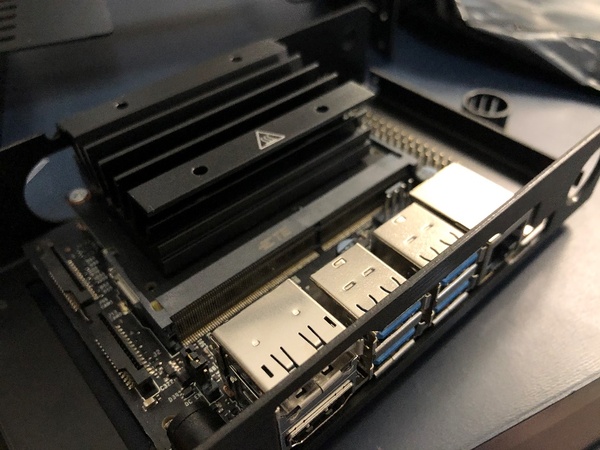
基板を載せてネジ止め
なくてもいいらしいのだが、偶然家にシリコングリスがあったので、ヒートシンクとケースの間に使うことにした。
シリコングリス
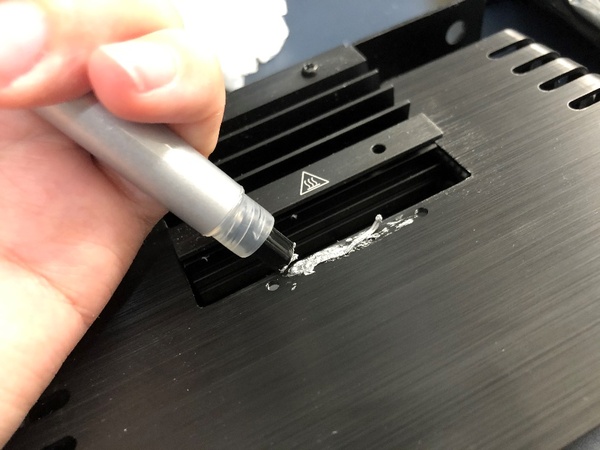
塗る
ちょっとはみ出たので
きれいにふき取り

ネジ止めして

側面パーツを付けて完成~~

よっしゃ
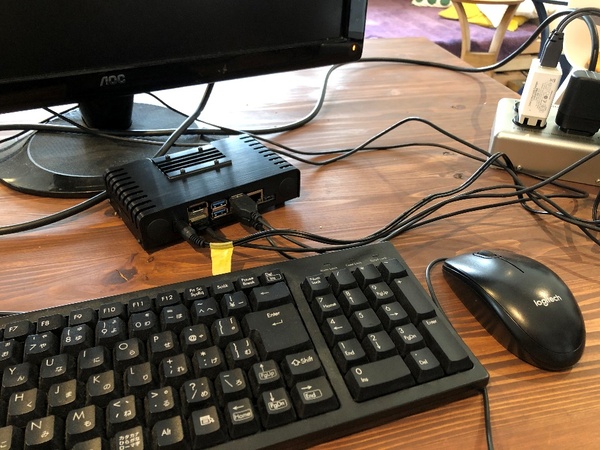
諸々接続する
キーボードとモニターとマウスを接続する。
電源はSDカードを挿し込むまで接続しない。
本記事はアフィリエイトプログラムによる収益を得ている場合があります
この連載の記事
- 第349回 生成AIなんでも展示会、想像以上に“なんでも”だった ホラーもぬいもロボも登場
- 第348回 動画の字幕つけ、こんなに楽になってたのか Adobe Premiere Proの自動文字起こしに今さら驚いた
- 第347回 AIで作った曲でDJした結果… 意外な壁があった
- 第346回 「そこそこ稼ぐおじさん」でいいのか? 迷ったあなたへ
- 第345回 順調なのに不安 その違和感、実は“次のサイン”です
- 第343回 メディアアート再燃?「TOKYO PROTOTYPE」に人が殺到した理由
- 第342回 休職中の同僚を「ずるい」と思ってしまうあなたへ
- 第341回 3Dモデルを必死にリギングした結果、「AIが優秀すぎる」ことに気づいた
- 第340回 VRChatでロボットになりたい筆者、最終的にBlenderを選んだ理由
- 第339回 復職が不安なあなたへ。“戻らない復職”を私が選んだ理由
- この連載の一覧へ
























