




スケールの大きな世界だが、作業は実に繊細なのだった
海洋調査や敷設工事、保守作業までを海上で行うケーブル敷設船には、さまざまな専用のシステムや装備が備わっている。海底ケーブルといえば「水面下数千メートル」「総ルート数百~数千キロメートル」といったスケールの大きな世界ばかりを想像しがちだが、実はその作業は繊細な側面も併せ持つのである。
敷設支援システム

すばる号の敷設支援システム。海中の状況を3次元シミュレーションし、敷設作業を的確に指示してくれる、ケーブル敷設線に欠かせない存在だ
事前の調査や海底地形データベースに基づいて、ケーブルを敷設するルートは細かく指定されている。基本的には陸揚げ地点どうしを直線的に(最短で)結ぶルートが理想だが、海底は平坦ではない。海底の起伏が大きかったり、海底地震が頻発したりするエリアは敷設が難しく、ケーブル故障も起きやすい。そこで、まずはそうしたエリアを避けたルートが設定される。
敷設船は、この事前に設計されたルートに沿って海底ケーブルを敷設していく作業を行う。高精度GPSによって船の位置は1メートル単位で把握できるのだが、「指定されたルート上を航行しながらケーブルを下ろしていくだけ」という単純な作業ではない。なぜなら、船からケーブルを下ろしても、その真下の海底にケーブルが着くわけではないからだ。
ケーブルを敷設する海底までは、通常で1000~1500メートル、深いときには8000メートルに達することもある。海流や潮流、風、船の動き(敷設船自身も常に流されている)、ケーブルの重量、海底までの深さといった要素が複雑に影響して、ケーブルが海底に着くまでには位置が大きく「ずれる」のだ。
この「ずれ」を補正するために搭載されているのが「敷設支援システム」である。具体的には、海底地形の3次元データや海流/潮流のリアルタイムデータを取り込みながら、3次元シミュレーションを実行する。その計算結果から「船がどの方位に、何ノットで進行しながら、どのくらいのスピードでケーブルを送り出していけばよいか」を指示してくれる。
NTT WEMの説明によると、顧客から期待される精度は通常「指定ルートから500メートル以内」程度だが、このシミュレーションシステムの助けによって、実際の精度は「5メートル~200メートル」程度で収まるという。
ダイナミックポジショニングシステム(DPS)

「ダイナミックポジショニングシステム」のディスプレイ。数値入力やジョイスティックによる手動操作で、船体を自在に操ることができる
敷設支援システムという高精度な“頭脳”の指示に応じて、作業を実行する“肉体”も精緻に動かなければならない。高精度な指示に基づいて船体を動かすのが「ダイナミックポジショニングシステム(DPS)」の役割である。
すばる号は、船の前後に2基ずつ、合計4基の電動推進機(モーター+プロペラ)を備えており、それぞれが360度自由に回転するようになっている。高精度GPSの力も借りながら、流れの強い海域でも同じ地点に留まる定点保持をしたり、船首や船尾だけを回転させてケーブルの送り出し方向を微調整したりできる。
先ほどの敷設支援システムが算出した船の航行コースや航行速度に従って、このDPSで船を精緻にコントロールしていく。ちなみに、ケーブル敷設中の航行速度は3ノット(時速5キロメートル、人間が歩くスピード)と非常に遅い。また、海底に起伏があればそのぶんケーブルも多く送り出さなければならず、航行速度も一定ではなく絶えず調整が必要となる。
鋤式ケーブル埋設機(Plow System)
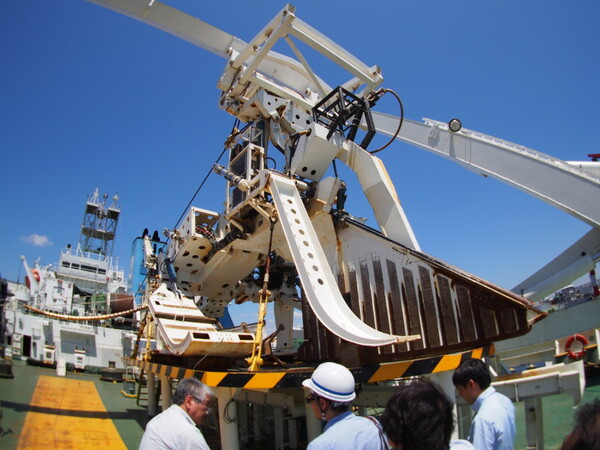
高さ6メートルもある鋤式ケーブル埋設機。巨大な牙を持つマンモスのようにも見える
深度1500メートルまでの比較的浅い海域では、海底を掘り起こしてケーブルを地中1~2メートルの深さに埋めなければならない。海中の埋設作業は、この巨大な埋設機で行われる。
埋設機の基本原理は、畑で牛が引っ張る“鋤(すき)”と同じだ。埋設機を海底まで沈め、船から伸びたケーブルで引っ張ることで、鋤の刃が海底に溝を掘っていく。埋設機の中心にはケーブルを通すガイドがついており、ここからケーブルを送り込むことで地中に埋設される。
海底ケーブル修理調査用ロボット(CARBIS III)

海底ケーブル修理調査用ロボット。船上から遠隔操作することができ、3000メートルまで潜行が可能
敷設済みのケーブルにも切断などの障害が発生することがある。そうした保守作業もすばる号の役割であり、ここで活躍するのが海底作業ロボットだ。船上からの遠隔操作により、3000メートルの深海まで潜行できる。
ロボットは、海底ケーブルを発見するための金属探知機、作業状況を操縦者に伝える水中カメラなどを搭載しており、遠隔からマニピュレーター(ロボットアーム)を使ってケーブルをつかんだり、切断したりすることができる。いったん船上に引き揚げて修復したケーブルを海底に再埋設するのも、このロボットの仕事だ。
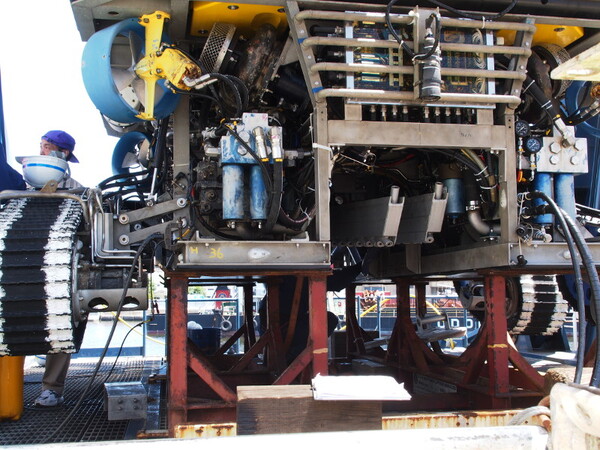
電動推進機やキャタピラー、ケーブル埋設用のジェットノズルなどが見える
上で紹介したシステムや設備のほかにも、光ケーブルの融着機器やX線検査装置など、実にさまざまなものが船上に用意されている。だが、NTT WEMとしていちばんの売りは「人の手と目で確認し、丁寧に作業していること」だという。「価格では負けても、故障率の低さでは負けない」からこそ、国内だけでなく海外通信キャリアからの発注も多いそうだ。
(→次ページ、成長著しいアジア諸国と米国とのゲートウェイ、APGプロジェクト)
本記事はアフィリエイトプログラムによる収益を得ている場合があります



