



ソフトウェア協会イベントで提言されたフィジカルAI戦略の「選択と集中」
最悪のシナリオは「フィジカルAI」による基幹産業の衰退 日本の勝ち筋は、“同期技術”と“ドメイン知識”
2026年04月06日 07時00分更新

「フィジカルAI元年」とも呼ばれる2026年。日本政府も同技術を重点領域として位置付ける一方で、ロボティクスや基盤モデルの開発では米中に遅れをとっているような状況だ。はたして、日本の勝ち筋はどこにあるのか。
ソフトウェア協会は、2026年2月、エンジニアの好奇心・探究心を再燃させるイベント「Tech Challenge Party」を開催。Algomaticの南里勇気氏のセッションでは、フィジカルAIにおける日本の立ち位置やそれを踏まえた現実的な推進戦略の打ち手について語られた。

Algomatic 取締役CTO 南里勇気氏
フィジカルAIにおける米中および日本の立ち位置
セッションに登壇したのは、DMMグループのAI特化企業であるAlgomaticのCTO・南里氏だ。AIロボティクス事業の責任者として、AIロボットの開発にも従事している。今回同氏は、米中の一次情報に触れてきた所感を踏まえて、日本のフィジカルAIの現状について解説した。
フィジカルAIは、NVIDIAのCEOであるジェンスン・フアン氏の提唱を機に、広く認知されるようになった。フアン氏はフィジカルAIを、「知覚し、推論し、計画し、行動するAI」と定義している。つまり、センサーで知覚し、基盤モデルで推論・計画を行い、アクチュエーターを通じて実世界で行動するAIを指す。
今、フィジカルAIが注目される背景には、「少品種大量生産」から「多品種少量生産」にシフトする中で、製造現場の多能工化が進んでいる現状がある。従来の産業用ロボットでは追従が難しい“環境やロボット自身の身体性の変化”に、柔軟に対応する技術として期待を集めているという。
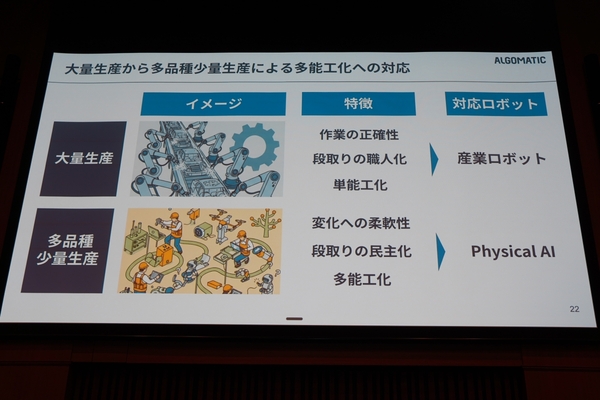
多能工化に対応するフィジカルAI
そのフィジカルAIを“象徴”するのが、人に似た形状や動作特性を持つ自律型ロボット「ヒューマノイド」である。その理由は、手の身体性で多数なタスクをこなせる点、人の既存インフラをそのまま活用できる点、人の動作データを学習に転用しやすい点など様々だ。
こうした将来性もあり、ここ数年、全世界でヒューマノイド開発が加速している状況だ。特に、多くのメーカーが台頭し、フィジカルAIへの投資も積極的なのが米国と中国だ。そして日本もまた、この動きに呼応している。高市総理は、フィジカルAIを国家の産業競争力と国際的地位を左右する重要領域として位置付け、「AIロボティクス検討会」にて具体的な戦略を提示している。
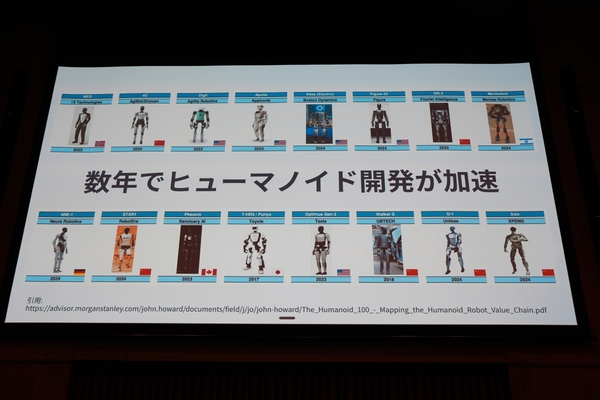
ここ数年で登場した世界のヒューマノイド
ただ、米中および日本は、フィジカルAIにおける競争力が大きく異なる。
フィジカルAIをレイヤーでみると、頭脳であるOS/基盤、心臓部であるチップ、身体であるハードウェアに分かれる。米国は、基盤モデルやOS、半導体において、すでにデファクトを掌握しているような状態だ。そして中国は、低コストの基盤モデルで追随しており、ハードウェアでも低コスト製造を可能にするサプライチェーンに強みを持つ。
一方の日本は、半導体では製造装置や素材で世界に貢献し、ハードウェアでは高品質なコンポーネントは生み出せるが、「サプライチェーンまでは構築できておらず、デファクトにも至っていない」(南里氏)のが現状だという。
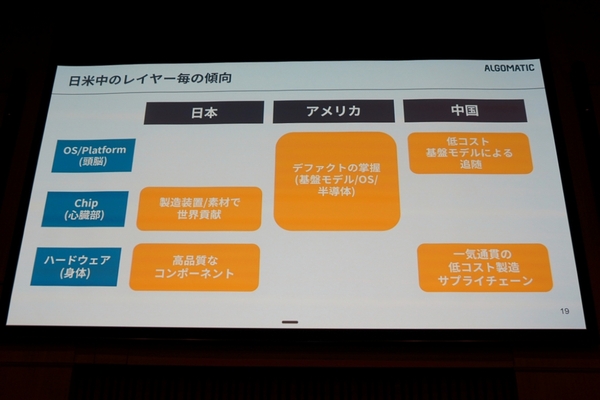
日米中のレイヤーごとの傾向
さらに、日米ではロボット開発のアプローチも対照的だ。米国はフィジカルAIの根幹をなす情報工学が主流なのに対し、日本は伝統的に強みを持つ機械工学的なアプローチに重きを置く。その結果、日本は斬新的な改善には長けているものの、ゲームチェンジを伴う“破壊的なイノベーション”を生み出しにくい状況にある。
本記事はアフィリエイトプログラムによる収益を得ている場合があります



