




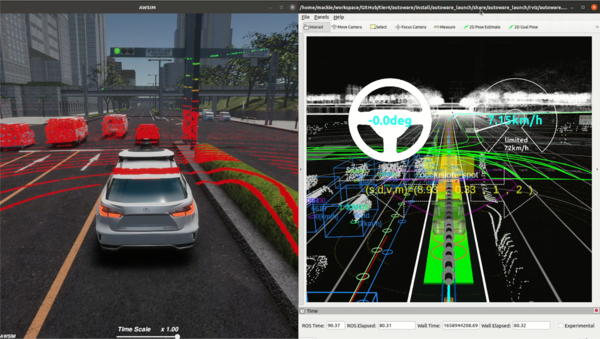
ティアフォーは11月28日、安全な自動運転システムを効率的に開発することを目的としたデジタルツイン指向の自動運転シミュレーター(Scene Simulator for Autoware - AWSIM)をオープンソースで公開した。
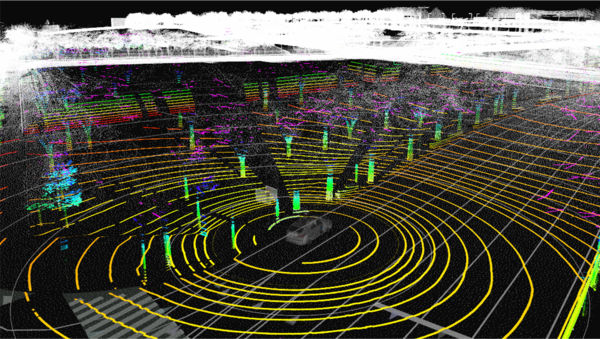
自動運転シミュレーターは、自動運転ソフトウェアの評価・検証を実現するために、3次元モデル地図をベースに仮想世界を構築し、リアルな物理モデルを用いたセンサーデータモデルと組み合わせることで、現実世界の運転および交通環境をシミュレーションする。また、今後、機械学習向けに学習用合成データを自動生成することで、機械学習を活用した物体検出や環境認識の学習および検証コストを大幅に低減できるようになるという。
同社のWeb.Autoは、自動運転シミュレーション、CI/CDデータパイプライン、データ管理、運行管理、遠隔監視を実現するクラウドネイティブかつエッジ集約型のDevOpsプラットフォーム。Web.Autoがこれまで実施してきた自動運転ソフトウェアの検証は、シナリオベースの運転および交通環境シミュレーション、走行ログを用いた現実事象の再現テストが中心だった。今回発表したデジタルツイン指向のエンドツーエンドシミュレーションがWeb.Autoのプラットフォームに加わることで、より安全な自動運転を実現するための目的に応じた効率的な検証ができるようになるという。
Web.Autoはアマゾン ウェブ サービス(AWS)のクラウドプラットフォームを採用している。また、デジタルツイン指向の自動運転シミュレーターはリアルタイム3Dプラットフォームで世界をリードするUnityの技術を採用している。
本記事はアフィリエイトプログラムによる収益を得ている場合があります





































で240Hz&0.03msという欲張り4Kゲーミングディスプレーが至高の逸品すぎた")





























