



音声指示や画面タップで作業を教示、動作も自動最適化する「ティーチングレスロボットシステム技術」
「キャベツの右に唐揚げを3個入れて」三菱電機がロボット導入を容易にする新技術
2022年03月01日 07時00分更新

三菱電機は2022年2月28日、ロボット導入を容易にする「ティーチングレスロボットシステム技術」の開発を発表した。高精度で話者の意図を理解する音声認識AIや、多関節型ロボット動作の自動最適化などの技術を盛り込み、専門知識がない作業者でも容易にロボット動作プログラムを自動生成し、人と同等の作業速度を実現することができるという。
同社によると、音声による作業指示技術の開発は、産業用ロボットメーカーとしては初めて。三菱電機 先端技術総合研究所長の岡 徹氏は、同技術について「食品、物流分野を主なターゲットとしており、メニューが頻繁に切り替わる食品工場など、これまでロボット導入が難しかった食品の盛りつけや仕分けなどの作業工程での自動化促進に貢献できる」と説明した。2023年の実用化を予定している。
三菱電機が開発した「ティーチングレスロボットシステム技術」の特徴

三菱電機 先端技術総合研究所長の岡 徹氏、同社 先端技術総合研究所 自律制御システム開発プロジェクトグループマネージャーの関 真規人氏
プログラミング不要でロボットの立ち上げ時間を「10分の1以下」に
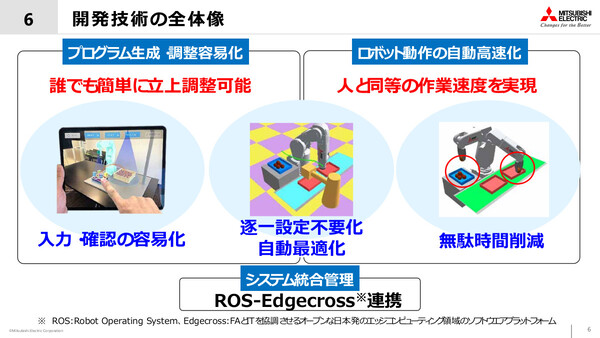
今回発表されたティーチングレスロボットシステム技術は、大きく「プログラム生成/調整容易化技術」と「ロボット動作の自動最適化技術」という2つの特徴を持つ。これにより、従来よりも簡単にロボットの立ち上げ調整や操作ができ、人間の作業者に負けない程度に作業を高速化することができるという。
適用先のメインターゲットの1つとして食品製造業を挙げているのは、同分野におけるロボット活用率がまだまだ低いためだ。三菱電機 先端技術総合研究所 自律制御システム開発プロジェクトグループマネージャーの関 真規人氏は、「食品製造業は近年、人手不足から自動化の要望が高まっている」としながらも、そこには大きな導入ハードルがあると指摘する。
「(食品分野での活用率が低い)背景には、ロボットの操作やプログラムの作成などの準備作業が初心者には難しいこと、システムの立ち上げ調整や品種切り替え(弁当のメニュー変更など)に時間を要すること、せっかくシステムを構築しても人間の作業のほうが速い場合が多いこと、などの理由がある」(関氏)
こうした導入障壁を解消するのが今回の技術となる。具体的なシステムはアームロボットとそれを動かすコントローラー、動体物スキャン/不定形物認識/静的環境スキャンを行う3台のビジョンセンサー、ロボットハンドの制御を行う力覚センサー、これらを制御するパソコンで構成される。さらに、作業者による作業指示は3次元センサーカメラとタブレットを使って入力できる。
たとえば弁当の製造ラインでは、あらかじめ3次元センサー(あるいはアームロボット先端のカメラ)でロボット周辺をさまざまな角度からスキャンして、仮想空間上に3次元モデルを生成。アームロボットの作業領域やモノの位置、障害物などを把握する。あとは動体物スキャンを行うビジョンセンサーを使用して、ライン上を流れる弁当箱を正確に把握し、作業指示に従ってアームロボットをリアルタイムに正しく動作させ、惣菜を詰めていく。
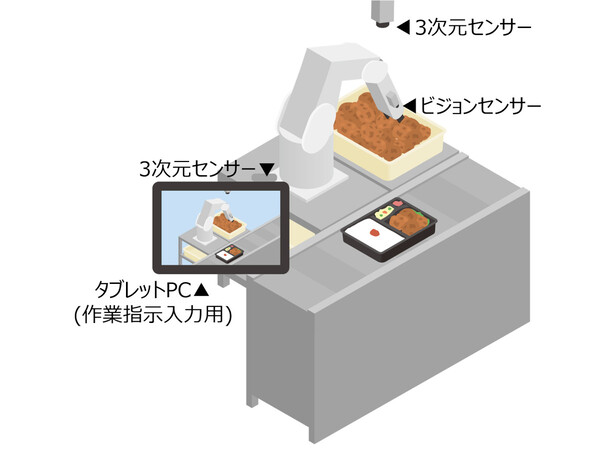
ティーチングレスロボットシステム技術の概略構成図
ロボットへの作業指示はタブレットを使い、音声あるいは簡単な項目選択で行える。音声入力の場合は「弁当箱の1番(区画)に唐揚げを3個詰めて」などと発話すればよい。また項目入力で指示する場合は、タブレットで「なにを」「どこに」「何個」といった項目をタッチし選択するだけで済む。また、これらの指示によってアームロボットが動作する軌跡は、タブレット上で映像としてAR表示/確認できるので、想定外の動作による事故も防げる。
従来は、こうしたロボットの動作をすべてプログラミングで制御する必要があったため、最適な動作をさせるまでに時間がかかっていた。今回のティーチングレス技術を利用することで、人間の作業者に新しい作業を教えるのと同じように、簡単な指示だけでロボットの動作プログラムを自動作成できる。同社によると、プログラム生成/調整にかかる作業時間を「従来の10分の1以下」に短縮できるという。
なお、作業環境周辺の騒音にも強い音声認識技術を採用して認識率を高めているほか、「意図理解AIモデル」の採用によって、作業者が自然な言葉で指示した作業内容を高精度で推定できる。「もうちょっと右」といったあいまいな指示や「キャベツの右」といった相対位置での指定も可能だ。三菱電機のAI技術「Maisart(マイサート)」は小型化が特徴であり、これを生かしてタブレットなどのエッジ機器にも搭載できる。
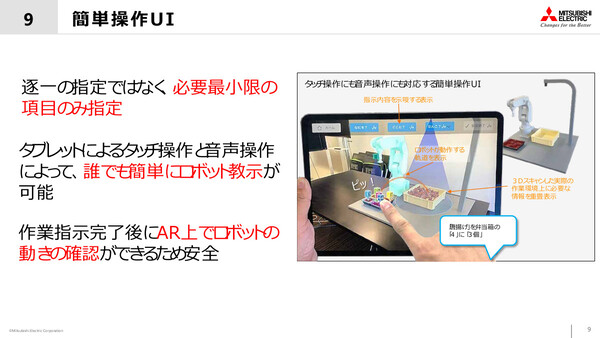
現場作業者でも簡単に扱える音声認識/タッチインタフェースを採用し、誰でも簡単にロボットをティーチングできるようにした
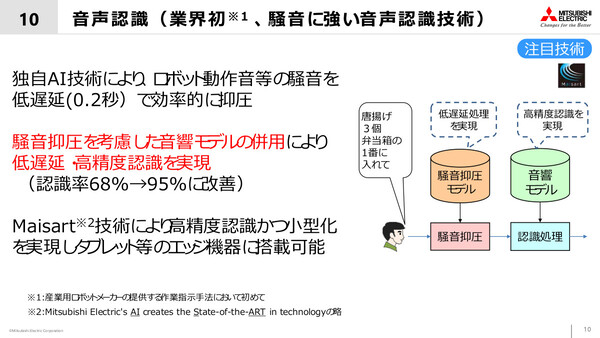
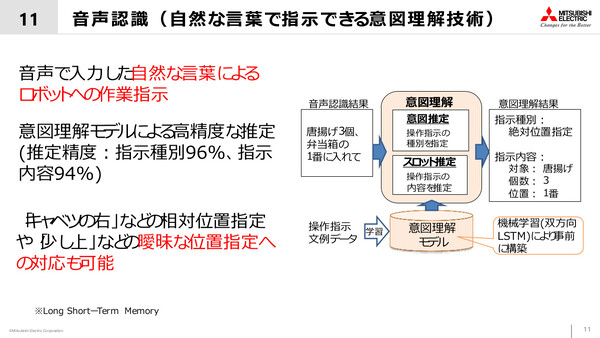
AIにより騒音をキャンセルして高精度な音声認識を実現。さらに作業者が自然な言葉で指示できる「意図理解AI」も採用している
アームやハンドの動きを自動最適化、作業の高速化を可能に
同技術のもうひとつの特徴が「ロボット動作の自動最適化」だ。たとえば動作の始点と終点を指示するだけで、試運転などをすることなく、周辺の設備に干渉しない軌道を秒レベルで自動生成する。このとき、速度や許容トルクの制約下で移動量最大軸が最高速度を維持できる軌道を算出し、さらに最適な加減速パターンや、停止時間を最小化しつつ安定把持を行うハンドの動作も自動計算するため、ロボットの動作時間が短縮される。
また、不定型な対象物のばら積み状態をシミュレーションで再現し、トレーニングを行ったモデルを使用する「把持認識AI」を備えており、高速かつ高精度にハンドによる把持位置を推論する。唐揚げのような形が揃っていない具材でも、画像からアームの角度やハンドの開口幅を判断し、さらに具材の変形や把持位置によるバランスなども考慮して安定して把持するため、高速な作業ができる。こうした技術によって、人間による作業と同等の作業速度を実現したという。
「ロボットが部材を把持し、指定の場所に置くまでの作業時間は、人手と同等となる1ピックあたり最短2秒を実現した。従来は3秒以上かかっており、作業時間を3分の1削減できている」(関氏)

高速かつ高精度に把持すべき位置を推論する「把持認識AI」
加えて「ROS-Edgecross連携機能」を開発し、Edgecrossの特徴である接続性とマルチベンダー性により、容易に生産ライン全体の監視、分析を可能としており、生産性向上や品質向上に貢献することができるという。関氏は「ROS(Robot Operating System)を含めた全システムログを、Edgecrossで収集することで、ライン性能評価が容易化できる」と説明した。
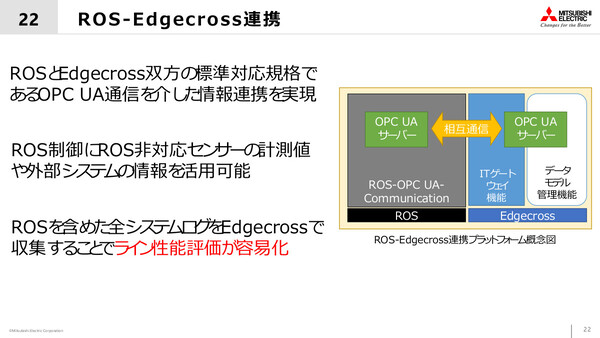
ROS-Edgecross連携機能の概要
三菱電機では、同技術を食品や物流の分野で順次実用化していくほか、電機電子分野など他分野にも幅広く展開していく方針。「将来的には、これまで多関節ロボットがまったく使われていないスーパーやコンビニエンスストアといった商業分野など、新規市場への展開の可能性も検討していく」(関氏)としている。
本記事はアフィリエイトプログラムによる収益を得ている場合があります



















で240Hz&0.03msという欲張り4Kゲーミングディスプレーが至高の逸品すぎた")
























