
筆者は以前、METCALF clione(メカフクリオネ)とMETCALF stage(メカフステージ)というウェアラブルアームロボットを制作した。
これらのウェアラブルアームロボットにはフタバのコマンド方式サーボを使っている。サーボモーターというのはサーボ機構において位置、速度などを制御する用途のモーターであり、ロボットなどによく使われている。
コマンド方式サーボは、双方向シリアル通信によるデータの送受信で、目標角度や動作特性の変更といった指示をサーボに与えたり、サーボから内蔵センサーの情報を取得したりできる。
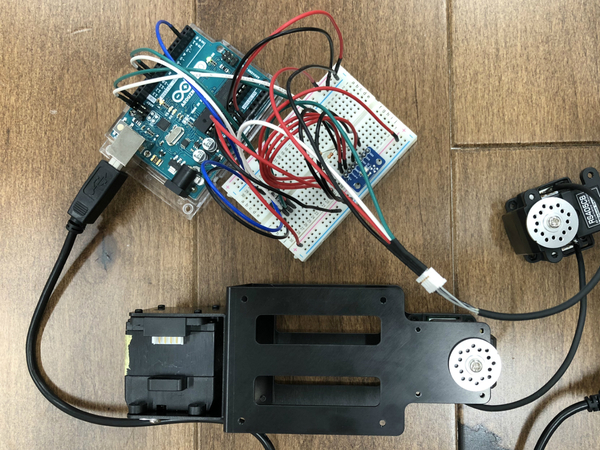
今回は、フタバのコマンド方式サーボ「RS405CB」を、「RSC-U485」というシリアル変換機とArduinoの2種で動かして、最終的に、息を吹きかけるとサーボが動くというコードを書いた。
まずは、RSC-U485をWindows 10で使えるようにする。こちらからドライバーをダウンロードする。Windows 10に対応したものはないが、Windows 7以前のOSに対応したもので使用することができた(私の場合なので保証はしない)。

RSC-U485
Windows 10でドライバーをインストールするには、ドライバー署名を一時的に無効化する必要がある。めんどくさい。こちらのサイトどおりにして署名を一時的に無効化した。
再起動の際にWindowsの回復キーを求められることがある。その場合は、こちらから回復キーを手に入れる。
無効化できたら、RSC-U485をPCに接続した状態でデバイスマネージャーを開きRSC-U485だと思われる対象を右クリックしてドライバーを更新する。これでRSC-U485が使えるようになった。
次に、PCとRSC-U485/RS405CBを接続する。以下の図のようにスイッチハブ「TB-RV71EH 7.4V/4W」を使って接続する。
本記事はアフィリエイトプログラムによる収益を得ている場合があります
この連載の記事
- 第345回 順調なのに不安 その違和感、実は“次のサイン”です
- 第343回 メディアアート再燃?「TOKYO PROTOTYPE」に人が殺到した理由
- 第342回 休職中の同僚を「ずるい」と思ってしまうあなたへ
- 第341回 3Dモデルを必死にリギングした結果、「AIが優秀すぎる」ことに気づいた
- 第340回 VRChatでロボットになりたい筆者、最終的にBlenderを選んだ理由
- 第339回 復職が不安なあなたへ。“戻らない復職”を私が選んだ理由
- 第338回 DJをやってみようと思い立った
- 第337回 「子どもを預けて働く罪悪感が消えない」働く母親の悩みに答えます
- 第336回 ChatGPT、Gemini、Claude──特徴が異なるAI、どう使い分ける?
- 第335回 100点を目指さない勇気。家庭と仕事、両立時代のキャリア戦略
- この連載の一覧へ
























