




Cellidは5月26日、大林組の建設現場において、独自のAR技術「Cellid SLAM」を使用して、作業員の3次元位置情報の取得に成功したと発表した。
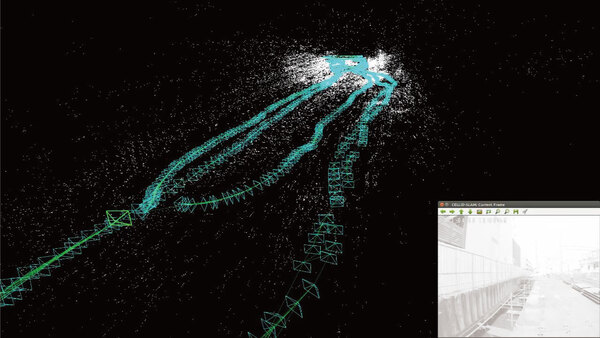
Cellid SLAMの空間認識アルゴリズムは、既に現場に導入している汎用単眼カメラの映像のみを入力情報として、非GNSS環境を含む大規模な建設現場において、GNSSやビーコンといった従来の自己位置推定技術を上回る測位精度を発揮することが確認された。
本実証実験は、屋内外の大規模で複雑な構造の建設現場で、汎用単眼カメラを装着して巡視する職員の移動経路を三次元の動線として把握することができるか、BIM/CIMを含むデジタルツイン・プラットフォームとSLAMで取得した三次元位置情報を統合することで、安全管理や労務管理のツールとして発展の可能性があるかの2つを検証するために実施した。

レーザーや赤外線を活用するSLAM技術は、専用センサーが必要なことから、デバイス費用が高額な上、センサー設置のスペースや電源供給に課題があった。そのため、ウェラブル・カメラや屋内用ドローン等、小型カメラと組み合わせた用途の提供は限定されてきたが、Cellid SLAMは汎用単眼カメラで動作する汎用性の高い技術である。
また、センサーの代わりに画像データを活用する研究も進められているが、膨大な計算負荷に加え、現場での活用に耐える精度を確保することが難しく、実装はできなかった。膨大な量の計算の高速処理と自己位置推定の精度の両立をCellid SLAMが解決した。
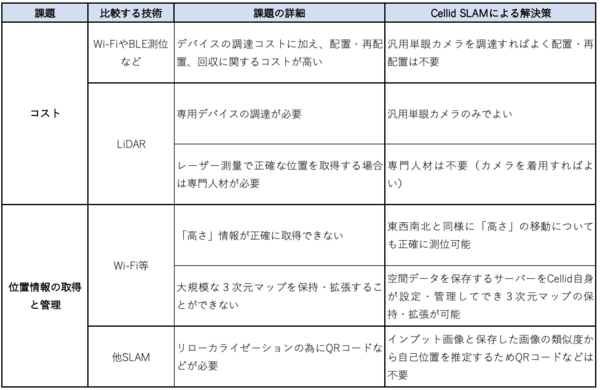
建設現場の屋内測位技術に関する一般的な課題として、主にWi-Fi等設備構築に伴うコストが高いこと、屋内の大規模で複雑に日々変化する現場の位置情報取得や管理の困難さがある。それらの領域で、Cellid SLAMが解決策は以下の表を参照。
BIM/CIM等から構築されたデジタルツイン上にウェラブル・カメラを装着した作業員などの位置情報を反映し情報の統合を進める。また、同一現場で同時に複数の作業員がウェラブル・カメラを装着・撮影することで、位置情報だけでなく、大規模な現場の点群データなどを収集することが可能。将来的に本位置測位技術とAR技術などを組み合わせることで「AR付箋」などの早期実現が期待できるとのこと。

本記事はアフィリエイトプログラムによる収益を得ている場合があります











&アスペクト比77:36って聞きなじみないけど使いやすいの?")

とBTO PCならではの特注PCパーツに大興奮")




















ゲーミングディスプレー、200Hz・1ms・昇降式多機能スタンドで3万2980円は断然買いでしょう")












