




GMOインターネットグループ
柔軟エレクトロニクスと先進情報技術による新たな可能性
【研究概要】
横浜国立大学 大学院工学研究院の太田 裕貴 准教授らの研究グループは、ストレッチャブルデバイス(※1)とAI(※2)を統合した柔軟な動作認識スマートシステムを開発しました。
柔軟性や伸縮性を持つストレッチャブルデバイスは、人体などの柔らかな面や大きく変形する対象にも密着させることができる次世代のウェアラブルデバイスです。このストレッチャブルデバイスとAI技術を統合することで、デバイスから得られたデータを解釈して意味を見出す高度な知的システムが実現できると期待されています。一方で既存のストレッチャブルデバイスの出力データは不安定でAIとの統合に必要な高い再現性が担保できませんでした。このため、高いデータ再現性を有するストレッチャブルデバイスとAI技術との統合システムの開発が望まれていました。
本研究グループは、硬質なICにゴムのような高い柔軟性を有する基板と液体金属配線を組み合わせて、高いデータの再現性を両立できる「ストレッチャブルハイブリッドデバイス」を実現しました。このデバイスから得たデータをAIによって分類することで、10種類の結び目の形状、空中に書いた26種類のアルファベット、65種類の手話の単語をそれぞれ87 %、98 %、96 %の正答率で分類することに成功しました。
これにより柔軟デバイスに既存の硬質センサと同等の計測能力を与え、AI技術に統合することが可能になるため、柔軟エレクトロニクスと先進情報技術の統合による新たな知的システムの実現につながることが期待されます。
本研究は、GMOペパボ株式会社でインターネットに関する新技術の創造と実践に取り組む研究開発組織 「ペパボ研究所」の栗林健太郎 取締役CTOらの研究グループと共同で行いました。
本研究成果は、2024年8月7日(米国東部時間)にCell姉妹誌である「Device」のオンライン版で公開されました。本研究は、科学技術振興機構(JST)戦略的創造研究推進事業「AIP加速課題」(課題番号:JPMJCR22U2)および文部科学省科学研究費助成事業「学術変革領域研究(B)」(課題番号:24H00890)の支援により実施されました。
(※1)電子回路や基板、パッケージなどの部品それぞれが伸縮性を持つように作製された電子デバイス。人体などの柔らかな面や大きく変形する対象に動きを妨げずに密着できることから、次世代のウェアラブルデバイスとして研究されている。
(※2)Artificial Intelligence(人工知能)の略称。大量のデータからパターンを学習したり、類似性に基づいてそれらを分類したりするなど、人間の脳が行うような高度な知的活動をコンピュータに行わせる技術のこと。
【研究の背景】
近年、伸縮性を持つゴム材料や導電性材料を用いたストレッチャブルエレクトロニクス分野の研究が広く進められてきました。今後は、デバイスレベルで開発が進められてきたこれらの技術を、社会実装に向けてさらに高度なシステムに昇華させることが期待されています。そのため、デバイスから得られたデータを解釈する手法として、大量のデータからコンピュータがパターンを見出すAI技術が注目されています。一方で伸縮可能なストレッチャブルセンサは、繰り返し使用による劣化や個体差により測定結果が大きく変動することが課題となり、データの再現性が重要であるAI分野との統合はこれまで進められてきませんでした。
【研究成果】
太田准教授らの研究グループは、液体金属を用いた伸びる電気回路と、柔軟性が部位によって異なる基板を用いて、既存の硬質な回路素子を柔軟なデバイスに組み込む技術を開発しました(図1)。この技術により、デバイスを2.5倍の長さまで伸ばした際も硬質な慣性センサICと同等のデータ計測精度・再現性を有するストレッチャブルハイブリッドデバイスを実現しました(図2)。
さらにこのデバイスを用いて、人がひもを結ぶ際の動き、空中に文字を書いた際の手の動き、手話を行った時の手の動きのデータを収集し、AI技術の一種である教師あり学習(※3)によって分類を行いました(図3)。その結果、動作のパターンから10種類の結び目の形状、空中に筆記した26種類のアルファベット、65種類のアメリカ手話の単語についてそれぞれ87 %、98 %、96 %の正答率で分類することに成功しました(図4)。
(※3)AI技術の手法の一つ。教師データと呼ばれる大量の参考データをコンピュータに学習させてパターンを見出し、未知のデータと学習したパターンを比較して結果を出力する。
【今後の展開】
本研究により、既存の硬質センサと同等の計測能力を有する柔軟デバイスを開発しました。また、こうした高性能な柔軟デバイスをAI技術と統合することで、動作認識のような知的システムが実現可能であると立証しました。これにより、既存の様々なセンサを組み込んだ高性能ストレッチャブルデバイスが開発されることが期待されます。また、ストレッチャブルエレクトロニクスが主なターゲットとする生体は、動作分析や音声認識、健康状態推測などAI技術によるデータ解析が活用しやすい対象です。本研究の成果を活用し、柔軟エレクトロニクスと先進情報技術を統合することで、動作認識に限らない新たな知的システムの実現につながることが期待されます。
【参考図】
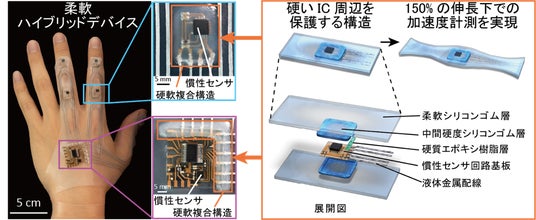
(図1)本研究のストレッチャブルハイブリッドデバイスの概要
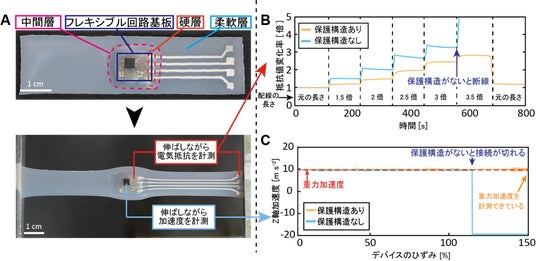
(図2)3層構造で保護されたストレッチャブルハイブリッドデバイスの安定性検証
A.検証に使用した1素子デバイスの画像。元の長さと液体金属配線を2倍の長さまで伸長した際の画像。
B.液体金属配線とフレキシブル回路基板の間の抵抗変化率。保護構造がある場合は250 %(3.5倍)まで伸長しても断線しない。
C.デバイスを伸長しながら慣性センサICと通信を行い、計測された加速度。保護構造がある場合は150 %(2.5倍)まで伸長してもデバイス上のICと通信できた。
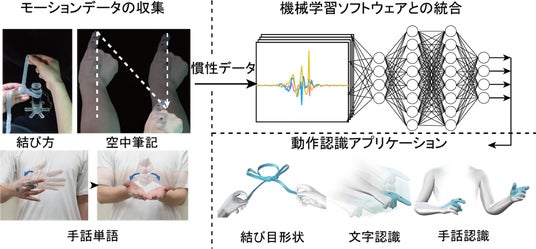
(図3)ストレッチャブルハイブリッドデバイスを用いた動作認識システムの概要
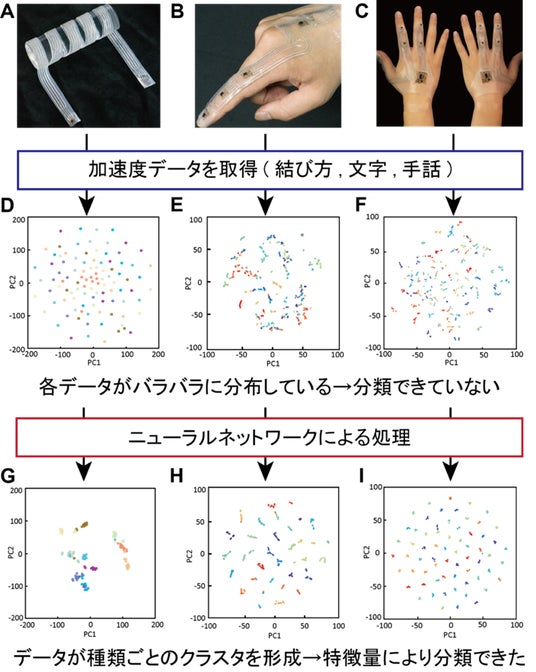
(図4)動作分類用デバイスとAIによる分類の結果。
A-C.結び目、指文字、手話の分類に使用したデバイス。
D-F. 取得したデータをそのままクラスタリングした結果。データがばらばらに分布しており、分類できていない。
G-I. ニューラルネットワークにより取得したデータを処理した後のクラスタリング結果。データが種類ごとにクラスタを形成しており、特徴ごとに分類できている。
■論文タイトル
“Soft intelligent systems based on stretchable hybrid devices integrated with machine learning”
doi:10.1016/j.device.2024.100496
以上
【GMOペパボ株式会社】(URL:https://pepabo.com/)
会社名 GMOペパボ株式会社(東証スタンダード 証券コード:3633)
所在地 東京都渋谷区桜丘町26番1号 セルリアンタワー
代表者 代表取締役社長 佐藤 健太郎
事業内容 ■ホスティング事業
■EC支援事業
■ハンドメイド事業
■金融支援事業
■AX事業
資本金 2億6,222万円
【国立大学法人横浜国立大学】(URL:https://www.ynu.ac.jp/)
学校名 横浜国立大学
所在地 神奈川県横浜市保土ケ谷区常磐台79-1
代表者学長 梅原 出
【国立研究開発法人科学技術振興機構】(URL:https://www.jst.go.jp/)
機関名 科学技術振興機構
所在地 埼玉県川口市本町4丁目1番8号 川口センタービル
代表者理事長 橋本 和仁
【GMOインターネットグループ株式会社】(URL:https://www.gmo.jp/)
会社名 GMOインターネットグループ株式会社(東証プライム 証券コード:9449)
所在地 東京都渋谷区桜丘町26番1号 セルリアンタワー
代表者 代表取締役グループ代表 熊谷 正寿
事業内容 ■インターネットインフラ事業
■インターネット広告・メディア事業
■インターネット金融事業
■暗号資産事業
資本金 50億円
Copyright (C) 2024 GMO Pepabo, Inc. All Rights Reserved.
Copyright (C) 2024 YOKOHAMA National University All Rights Reserved.
Copyright (C) 2024 Japan Science and Technology Agency






Amazonのアソシエイトとして、ASCII.jpは適格販売により収入を得ています。
ASCII倶楽部
注目ニュース




ピックアップ
-

sponsored
関西のネットワークの心臓部「堂島」直結 相互接続性と手厚いサポートで選ぶなら選択肢は1つ
大阪のDCといえばスマコネ!今選ばれるネットワークデータセンターとは?
-

sponsored
「Satechi OntheGo 7 in 1 マルチポートアダプター」レビュー
業務必須の7ポートをギュッとまとめたUSB Type-Cモバイルハブ「OntheGo」が買いだ!
-

sponsored
「TOKYO Gaming-PC STREET 7」よりサイコムの展示/ステージをレポート!
週末、秋葉原でサイコムのゲーミングPCを買うとめちゃくちゃお得だったんですよ。その理由とは……
-

sponsored
AMDのゲームテクノロジーセット「FSR “Redstone”」解説。新GPUが出なくてもソフトは劇的に進化する
-

sponsored
大きさ1.5倍はそのまま、食べて「おっ!」 ファミマの「大きなおむすび」に意外な変化
-

sponsored
斬新ながらインテリアに溶け込むデザイン 最新のWi-Fi 7対応で性能も十分!
こんな“魅せまくる”Wi-Fiルーターってあった? ファーウェイの「HUAWEI WiFi Mesh X3 Pro」が美しすぎる
-

sponsored
「TOKYO Gaming-PC STREET 7」3月7日(土)開催決定!
be quiet!の静音設計パーツを使いまくったら、ものすご〜く静かなゲーミングPCが完成するのでは?
-

sponsored
「デジタル資産×現場データ」の勝利の方程式とは?
フィジカルとAIをつなぐOODAループはもう実装可能 ソラコムとセンシンロボティクスが語る「リアルワールドAIプラットフォーム」
-

sponsored
マウスコンピューター「mouse K7-I7G50BK-A」
年度末のこの時期はPC買うべし! 場所を取らずに大画面、32GBメモリー搭載の17.3型ノートがオトクなセール中
-
の1台が今ならオトク!")
sponsored
マウスコンピューターのゲーミングPC「G TUNE FZ-I7G80」がセール中
【ゲーミングPCが7万円オフ】憧れのスペック(Core Ultra 7+GeForce RTX 5080)の1台が今ならオトク!
-

sponsored
1リットルの衝撃、手のひらサイズに凝縮されたNVIDIA RTXのパワー! プロが託す信頼の「ThinkStation P3 Tiny Gen 2」
-

sponsored
じゃんけん大会は400人参加!!
東北初出店のアプライド仙台店スゴすぎ!初日で約3000人来店したオープンイベントで1日店員してきた話
-

sponsored
「TOKYO Gaming-PC STREET 7」3月7日(土)開催決定!
パソコンショップSEVENの強化ガラス製ピラーレスの白いゲーミングPCがかっこいい。触りにきませんか?
-
sponsored
「TOKYO Gaming-PC STREET 7」3月7日(土)開催決定!
サイコムさんが、とあるイベント来場で1TB SSDを2TBに無償でアップグレードしてくれるらしいんですけど……!
-

sponsored
現地のカメラ映像を見ながら遠隔作業指示も。「オプテージ曽根崎データセンター(OC1)」の新サービス
人手不足のIT運用部門、その課題をOC1のデータセンター運用支援サービスが解決する
-

sponsored
リピーターの多さに納得のアフターサポートも必見
静音ゲーミングPCはもっと小型になる?個性派BTO PCの雄・サイコムに計画中の新製品からPCの寿命が延びるお掃除のコツまで訊いてきた
-

sponsored
JN-IPSM27G240Q-HSPをレビュー
4万円台の27型WQHDゲーミングディスプレー、240Hz・1ms・Mini LED・昇降式多機能スタンドの欲張り仕様なら余裕で買いでしょう
-

sponsored
アプライド仙台店が2月28日(土)オープン
アプライドがMSIノートPC導入を掲げて仙台へ。8年ぶりの新店が挑む「ネット時代の実店舗戦略」とは
-

sponsored
スマートバンド? スマートウォッチ? どっちにしてもGPS搭載でさらに便利になった!
約1万円でこれはもう本格スマートウォッチ!「HUAWEI Band 11 Pro」レビュー
-

sponsored
MSI「MPG 274URDFW E16M」レビュー
これが液晶最強クラスのゲーミングモニター!4K160HzとフルHD320Hzを瞬時に切り替えられるMini LEDのOLED級画質にひたすら感動した話
-

sponsored
12個のカスタム可能なボタンと2つのダイヤル、LCDディスプレーを搭載
え、Stream Deckがすぐ手元にあるってこんなに便利なの!? キーボードと合体した「GALLEON 100 SD」を試した
-

sponsored
進捗もリスク把握もレポート作成も! コツコツ記録した業務の情報が“組織の資産”に変わる!
まもなく登場! Backlog AIアシスタントを試したら「できたらいいな」がサクッとできた
-

sponsored
Zoom活用事例:株式会社マクロミル
4500名規模のオンラインイベントと年100回のウェビナー マクロミルのマーケティング施策を支えるZoom Webinars
-

sponsored
メンバーを無言にさせた3つの不安は仕組みで解消する
無言の会議が怖すぎる——心理的安全性を「仕組み」でつくり、お互いに指摘し高め合えるチームへ
-

sponsored
サイバー攻撃の侵入と拡大を根本から防ぐ“脱VPN”と「Fortinet ユニファイドZTNA」
「わずか3日」で狙われたVPNの脆弱性! 対策が後手に回り500GBの情報漏洩… どうやったら防げた?
-

sponsored
メモリーの価格高騰でDDR4が再注目! あえて今DDR4で組むのは正解か?
-

sponsored
最速レビュー! ASRockの新セグメント「Rock」シリーズマザーボードは、モダンですっきりとしたデザインながら快適すぎる⾃作体験を実現
-

sponsored
Crucialブランドで発売中のSSD製品を総まとめ!【外付モデル編】
【ありがとうCrucial】データを運ぶなら「信頼」を選びたい。最後に買っておくべきポータブルSSD総まとめ
-

sponsored
Crucialブランドで発売中のSSD製品を総まとめ!【内蔵モデル編】
【ありがとうCrucial】今こそ手に入れるべき、Micron品質の内蔵SSD総まとめ
-

sponsored
止まらないネットワークとセキュリティを融合 フォーティネット「FS-AXシリーズ」の目指す高み
安定性とセキュリティを両立 フォーティネットとアラクサラのシナジーには期待しかない
-

sponsored
ZEFT Z59Qの魅力をインタビュー
これはファンじゃなくても欲しくなる!CORSAIRづくしのゲーミングPC、タッチスクリーン付きの特別仕様も?
-

sponsored
STYLE-14FH128-U5-UCRXMをレビュー
大学生のPCはこれで決まり!? 4年保証で1kg未満の14型ノートPCが15万円台はこのご時世でお手頃すぎる
-

sponsored
JN-V100U-Mで「REANIMAL」をプレイ
元・廃校の体育館にて100型4Kディスプレー&11.1.4chのサウンドバーで最新ホラーゲームをやってみると……
-

sponsored
IDOM CaaS Technology×TTS×ソフトバンクの協業で、社会課題に新たな解決策を作る
“車が必要なのに乗れない”人を救う「ノレル」 IoT×AIが実現した新たな自動車サービス
-

sponsored
創業10周年記念企画を密着レポート
JAPANNEXT、2025年に発表した171製品を校庭に全部並べて謎の料理・キョン汁で10周年を祝う
-

sponsored
FREX∀RブランドのFRZAB850W/985をレビュー
Ryzen 7 9850X3DでARC Raidersも超快適なゲーミングPC、標準3年保証も魅力的
-
")
sponsored
富士通でこれなら満足、必要十分な性能を持つ12万円台ノートパソコン「FMV WE1-K3」(性能検証編)
-

sponsored
Zoom活用事例:トラムシステム株式会社
AI時代のコンタクトセンターを見据えて 「Zoom Virtual Agent」と共に進む通信サービス企業
-

sponsored
ビデオカードなしで「FFXIV: 黄金のレガシー」の60fps超えが狙える!? 「AMD Ryzen 5 8600G」の実力を見た!










Amazonのアソシエイトとして、ASCII.jpは適格販売により収入を得ています。

