




京セラは1月20日、神奈川県横浜市にある横浜中山事業所内に開設した、自動運転などの走行テストができる「中山テストフィールド」をプレス向けに公開。あわせて同社が取り組んでいる車載関連技術についての説明が行なわれた。

横浜中山事業所内に自動運転テストが可能な「中山テストフィールド」を開設
中山テストフィールドは2021年12月に実運用を開始。広さは50×100mとなっており、一般的な道路を模した周回路のほか、砂利道やタイル張りの凸凹路(ベルジアン路)、傾斜角度プラスマイナス10%の坂道がコースとして組み込まれている。さらに自動駐車機能をチェックするための駐車場や、トンネルや暗闇を再現して実験をする環境試験建屋などが用意されている。
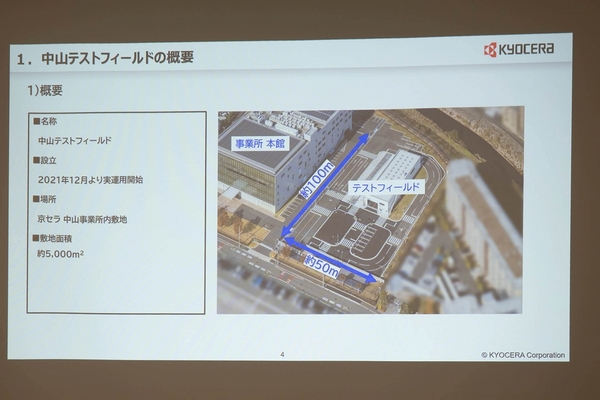
中山テストフィールドの概要
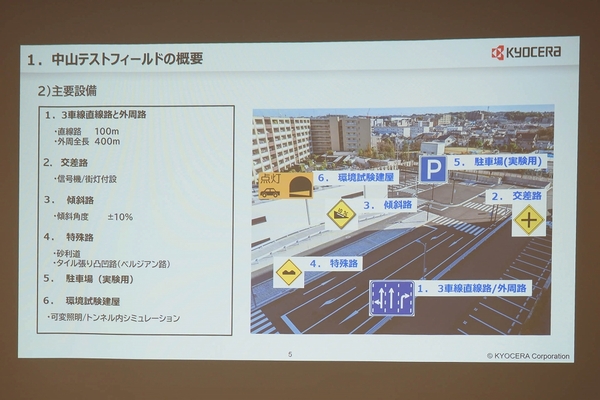
中山テストフィールドの主要設備

一般道を模したテストコース

左からタイル張りの凸凹路、砂利道、傾斜路

駐車場もテストコース内に設置
京セラの研究開発本部 先進技術研究所 所長 小林正弘氏は、中山テストフィールドの開設理由について、「開設はコロナ禍前からスタートしていた。走行テストなどをしたくても、外部施設を借りるのが大変だったため」と話しており、「閉業した自動車教習所の敷地を購入するといった案もあったが、この事業所にスペースがあったので、事業所長にお願いして開設させてもらった」とのこと。ちなみにテストフィールド開設前は、芝生で養生された空きスペースだったとのこと。

京セラ 研究開発本部 先進技術研究所 所長 小林正弘氏
テストフィールドでは、路車協調 自動運転システムやV2I路側機/車載器、車載センサーといった通信技術やセンシング技術の研究・実験ができる。自社で専用のテストフィールドを持つことで、研究開発期間の短縮や品質・信頼性の向上/確保、事業パートナーの獲得や連携がしやすくなっている。

信号機や街灯も敷設
小林氏は「外部で実証実験を行なう前に、あらゆる条件で問題が起きないようにテストできる。その上で実証実験では想定外の問題に対して集中できる」とテストフィールドを自社で運用するメリットについて説明していた。
今回この中山テストフィールドで行なった、京セラが取り組んでいる車載関連技術のデモは4つ。ひとつめは、同社がBYDのBEV(バッテリー電気自動車)バス「J6」をベースに開発した自動運転バス「trota(トロタ)」の走行実験。周回コースを自動走行させる際に、見通しの悪い右折先横断歩道上に歩行者に見立てたマネキンを起き、ちゃんと検知して停車できるかというテストが実施された。

自動運転電気自動車バス「trota」

マネキンを検知して自動で停止
もちろん問題なく停車できたが、マネキンだけではなく、環境試験建屋をトンネルに見立てて、クルマが飛び出してくるといった実験も可能とのこと。

trotaの運転席まわり
ふたつ目は「マルチファンクションミリ波レーダー」を使った、近距離と遠距離の同時検知実験。ADAS(先進運転支援システム)では死角検知や空間検知、駐車支援などにミリ波レーダーが使われている。この精度を上げるためには、複数の周波数帯を使ったレーダーが必要となるが、京セラは遠距離の障害物用に77GHz、近距離用の79GHzを「マルチファンクションミリ波レーダー」としてひとつのデバイスに組み合わせたユニットを開発。

テスト用に設置された「マルチファンクションミリ波レーダー」
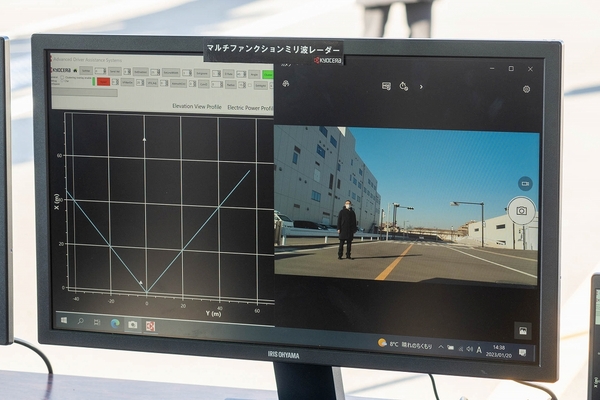
手前の人と奥の自動車を検知して、▲マークで表示
このユニットは「高速レーダーモード」と「ビームフォーミング」も装備しており、高性能・高精度かつコンパクト。自動車にレーダーを取り付ける際に、レーダーの大きさや数が問題になっているが、マルチファンクションミリ波レーダーにより、従来のシステムと比べてレーダーの取り付け個数を減らすことができる。

左が乗用車などに搭載されるユニットで、右はインフラ用のユニット
3つ目は「車載ナイトビジョンシステム」。白色光と近赤外光一体型ヘッドライトによって、暗闇だけでなく、霧など視界の悪い状態でも物体を検知できるシステムだ。

テスト用にセットされた「車載ナイトビジョンシステム」
テストは環境試験建屋で実施。環境試験建屋は、屋内の壁や天井に光の反射をおさえる塗装がされており、昼間でもシャッターや扉を閉め照明を消すと、家屋や街灯のない郊外路を再現可能となっている。

環境試験建屋内部

環境試験建屋内部をくらい郊外路としてシミュレート
デモは、暗闇のなかで黒い服を着た歩行者が歩いているという設定で実施。「車載ナイトビジョンシステム」からのデータがディスプレー上に表示され、RGB側ではかなり人が近づかないとぼんやりとした状態でしか表示されないが、IR(近赤外光)では、遠距離でも全身がしっかりと把握できていた。またフォグマシンで霧の状態を再現した場合ではさらに顕著だった。
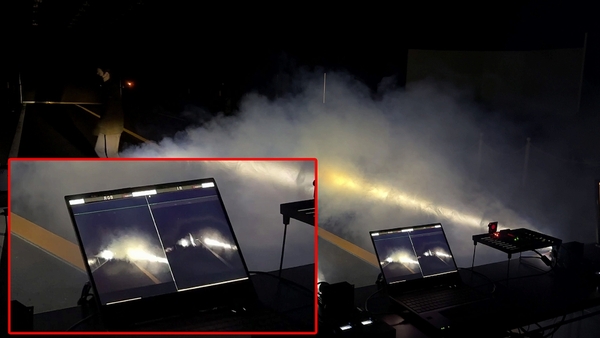
霧の状態でもIRで人を判別
京セラではIR側の映像を目視に使うよりも、RGB側の映像と組み合わせ、さらにAI技術で処理することにより、夜間や濃霧といった状態での障害物警告といったシステム活用していきたいとのこと。
最後はLiDARとカメラを組み合わせた「カメラ-LiDARフュージョンセンサ」を使った、落下物検知テスト。落下物などの検知には、レーザーの反射を使った「LiDARセンサー」が使われるが、黒いゴムはレーザーを反射しにくいため、タイヤの検知が難しい。そこで「カメラ-LiDARフュージョンセンサ」では、カメラの映像とLiDARを視差ゼロで組み合わせることで、より精度の高い落下物が検知できるようになっている。

「カメラ-LiDARフュージョンセンサ」を天井に搭載

LiDARとカメラがセットになっている
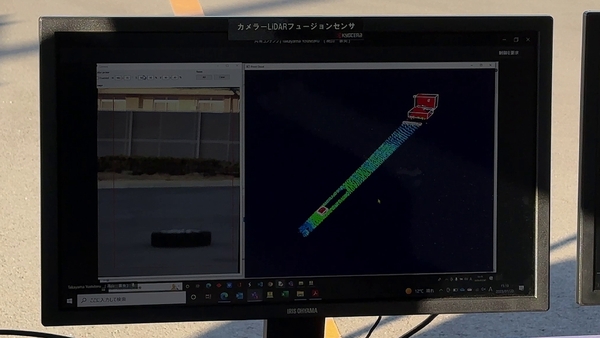
タイヤの位置を正確に検知
テストでは70m先にタイヤを落下物として配置。「カメラ-LiDARフュージョンセンサ」を搭載したクルマで接近していくと、タイヤの位置や距離、大きさを正確に検知していた。
本記事はアフィリエイトプログラムによる収益を得ている場合があります























で240Hz&0.03msという欲張り4Kゲーミングディスプレーが至高の逸品すぎた")




















