




ヴイストン
機体やセンサーの挙動など、これまで以上に詳細な再現が可能に
ヴイストン株式会社(本社:大阪府大阪市、代表取締役:大和信夫)は、好評販売中の研究開発用台車ロボットシリーズに対応するGazeboシミュレーターモデルを更新し、大幅に精度を向上させました。各モデルは無償で公開されます。
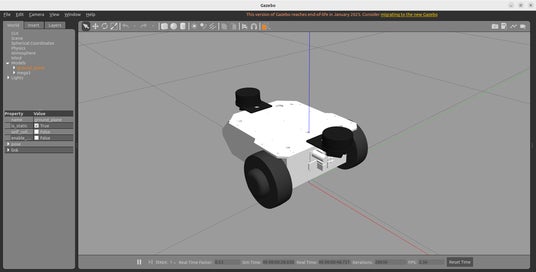
Gazeboシミュレーターモデル例
■主な特徴
ヴイストン株式会社製の研究開発用台車ロボットシリーズは、さまざまな分野の研究・開発用途に対して利用可能なロボットプラットフォームです。駆動方式や可搬重量が異なる多彩な本体ラインナップが用意されているほか、ArduinoIDE対応の本体制御基板、ROS・ROS 2に対応するオプションデバイス、各種のセンサーオプションなどが特徴で、目的に合わせた自由なカスタマイズや開発が可能です。
各種機体に対応するシミュレーターモデルは、以前より無償で公開されていましたが、機体形状の基本的な再現のみで、詳細なシミュレーションを行うにはユーザーでの追加開発が必要でした。今回公開するシミュレーターモデルは、車体の挙動をより詳細に再現が可能なよう機能拡充しており、サスペンションの動きや2D LiDAR(LRFオプション)の動作もシミュレーションが可能です。
台車型ロボットによる開発や運用においては、実環境を前提としたハードウェア、ソフトウェアの最適化が必要となります。今回公開するシミュレーターモデルは、その実装や開発をより安全、迅速に行うことを可能とするもので、ロボットの社会実装に向けた取り組みを加速することに貢献します。
本モデルを含むヴイストン製の研究開発用台車ロボットシリーズは、2025年12月3日(水)~12月6日(土)の間、「2025国際ロボット展」のヴイストン株式会社ブース(共同出展:一般社団法人i-RooBO Network Forum)、小間番号:W4-80にて展示いたします。ぜひご来場ください。
(1) 機体やセンサーの詳細な挙動を再現
今回公開するモデルにおいては、研究開発用台車ロボットの各種車輪の動きをシミュレートすることが可能です。サスペンションが搭載されている機種においてはその挙動も再現しているほか、センサーとして2D LiDAR(LRFオプション)の動作も再現が可能です。これにより、機体の動作に必要なエリアの検討や、SLAMが実現できるかの基礎的な確認などがシミュレーション可能となりました。
なお、シミュレーターモデルに搭載されていない構造(2D LiDAR以外のセンサーや、カスタムで構成した機体構成など)は再現されておらず、ユーザーにて構築する必要があります。
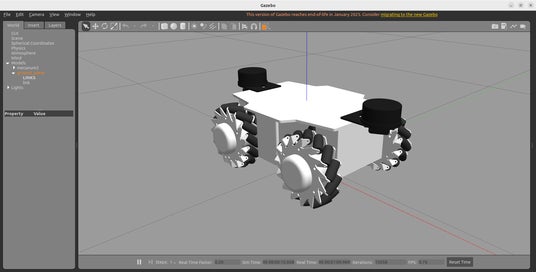
Gazeboシミュレーターモデル例
■YouTube動画:サスペンションの挙動をシミュレート可能
シミュレーター内で、40kgの重りを投下した場合の再現を行っています。サスペンションが沈む様子や、重りを除去した際にサスペンションが「元に戻る」様子が再現されています。
(2) シミュレーションを活用するメリット
ロボットの研究・開発や実用においては、その運用環境に応じたカスタマイズや最適化が必要になることが一般的です。同時に、運用環境側をロボットの挙動に合わせて設計する必要もあり、綿密な擦り合わせや試行錯誤が不可欠です。シミュレーションの精度を向上させることは、実機および実環境におけるテスト工程をより効果的に実施することに繋がり、効率のよい開発を行うことに寄与します。
弊社で想定する、シミュレーションを活用するメリットは、以下のようなものが挙げられます。
・実機の消耗・破損リスクを低減
実物のモーター・バッテリー・ギア・センサーを使用しないため、実機への負荷を避けつつ、衝突試験や高負荷動作も安全に検証できます。
・ナビゲーションやSLAMの実行において、ソフトウェア面での調整作業を大幅に効率化
Nav2およびSLAM Toolboxの各種パラメーター(速度、加速度、コストマップ、クリティックなど)を、実環境の制約なく繰り返し評価することが可能です。実環境における試行錯誤と比較し、大幅に効率のよい進め方を実現できます。
・実機と同一のROS 2ノード構成で事前確認が可能
Launch構成、Nav2、SLAM、TF などを実機と同じセットアップで動作確認できるため、実機投入前の不具合発見が容易になります。
・多様なテストシナリオを自由に再現
狭い通路、障害物、段差、センサー故障など、現場では再現が難しい状況もシミュレーション環境内で容易に試験できます。
・大規模あるいは複数ロボット環境にも対応可能
複数台のロボットによる協調動作や、広い施設での走行など、実機では難しい大規模テストを安全かつ低コストで実施できます。
・ハード未完成の段階でも開発を先行できる
URDFやセンサーモデルがあれば、ハードウェアが揃う前からROS 2ノード開発、評価を進めることができ、開発期間の短縮化に貢献します。
・機材追加の際の詳細検討に活用可能
ロボットのハードウェア更新や追加を検討する際に、旧モデルのコードを流用する等にて、迅速に評価、開発することが可能となります。
なお、一般的なシミュレーションにおいては、現実世界のすべての事象を再現することは困難で、シミュレーション結果と現実の結果とには差異が生まれます。実機の挙動と完全一致するものではないことにご留意ください。
本シミュレーターモデルは、ROS 2 Humbleの環境で動作確認を行っています。環境が異なる場合、シミュレーションの実行結果に差異が生じる可能性があります。
■製品情報について
ヴイストン株式会社製の研究開発用台車ロボットについて。詳細な情報は下記URLをご参照ください。
研究開発用台車ロボット 製品ページ: https://www.vstone.co.jp/products/wheelrobot/
■本件に関するお問い合わせ先
ヴイストン株式会社
〒555-0012 大阪府大阪市西淀川区御幣島 2-15-28
E-mail: infodesk@vstone.co.jp
https://www.vstone.co.jp/
本記事はアフィリエイトプログラムによる収益を得ている場合があります




















で240Hz&0.03msという欲張り4Kゲーミングディスプレーが至高の逸品すぎた")





























