




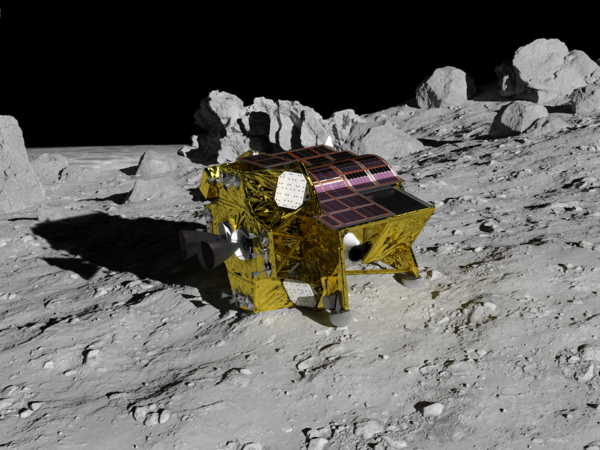
不思議な形状をしている日本の月面着陸機「SLIM」の着陸イメージ (C)JAXA
今、月面着陸を目指すのはなぜか
2022年秋から、日本の探査機がたびたび月面着陸に挑戦していることをご存じだろうか。
1機目は米国の超大型ロケットSLS初号機に試験的に搭載された、JAXAの月面着陸機「OMOTENASHI(オモテナシ)」。10センチ角のキューブ6個分、スーツケース程度の大きさという超小型サイズながら、小さなエンジンの噴射で着陸時の加速を弱める"セミハードランディング"という方式を目指し、どこまで月の重力を制することができるかチャレンジした。しかし、残念ながらロケットからの分離の問題で、月の軌道までたどり着くことはできなかった。
2機目は記憶に新しい、日本初の民間月探査を目指すispace(アイスペース)の初着陸ミッションだ。こちらはメインとサブ、2種類のエンジンを逆噴射して月の重力による加速を制御しながら、まっすぐ月面に直立するように降りる方式だ。
4月26日に初着陸に挑戦したが、失敗。報告によれば、事前の飛行計画の中に、クレーターの内側に入った際の急激な高度の変化が織り込まれていなかったことが原因と考えられている。フライトコンピューターが高度情報を"誤っている"と結論づけてしまったため、実際よりも数km以上高いポイントからエンジン噴射を開始。余裕だったはずの推進剤も途中で尽きてしまい、ハードランディングしてしまったようだ。
これまで月面着陸に挑戦し、無事に着陸することができたのはソ連、米国、中国の3ヶ国だけ。2019年にはイスラエルの探査機「べレシート」とインドの「チャンドラヤーン2」が月着陸に挑んだが、成功しなかった。月の重力を制御して安全に着陸するということは、決してたやすいことではない。
世界初の"ピンポイント着陸"へ
日本の探査機は、これまで小惑星イトカワとリュウグウで着陸に成功している。直径1km以下の小さな小惑星の重力は、地球の数万分の1〜数十万分の1程度で、イトカワの表面で人がジャンプすると宇宙に飛び出してしまうほどだ。このため「はやぶさ」、「はやぶさ2」は小惑星に接近しても、エンジンを噴射すればその重力を振り切って安全な高度まで退避でき、着陸前にリハーサルができたのだ。
一方で月の重力は地球の6分の1。地球よりは小さいものの、1度失敗すれば月面に衝突して探査機が壊れてしまうには十分すぎる。脱出には大量の推進剤を必要とするため、リハーサルも難しい。この厳しい月面着陸へと次に挑むのが、JAXA 宇宙科学研究所が開発した小型月着陸実証機「SLIM」。2023年8月以降の打ち上げが決まり、完成した機体が報道公開(6月4日)された。
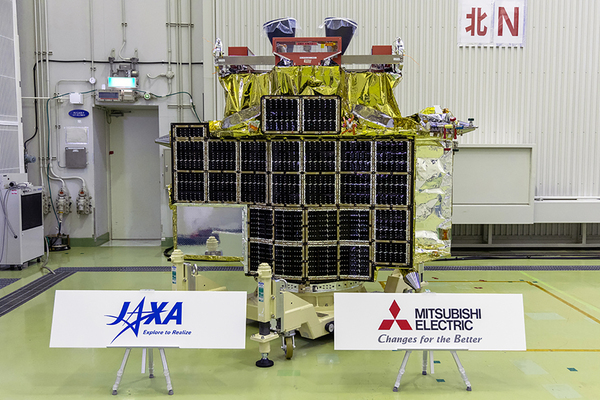
種子島宇宙センターで公開されたJAXAの月面着陸実証機「SLIM」 (C)JAXA
これまでの月着陸機(無人)は、1960年代の米国の「サーベイヤー7号」が約1トン、ソ連の「ルナ9号」は約1.5トン、2013年に3カ国目の月面着陸を達成した中国の「嫦娥3号」が約3.8トンと、歴史的に大きく重い着陸機が中心だった。着陸精度は、嫦娥3号でも6kmと”キロメートル級”となる。SLIMはこれをぐっと小型軽量の約700kg(推進剤込み)に削減し、それでいて着陸精度を100mにまで向上させた”ピンポイント着陸”を目指しているのが凄い。
月は人類にとって最も身近な天体だ。長い間観測されているからこそ「どこでも着陸できればよい」というわけではなくなっているのが現状だ。「地質年代の異なる領域に降りたい」、「水の有無を探査したい」、「できたばかりのクレーターを調べたい」などサイエンスの要望は多様化している。それに答えるため、"ピンポイント着陸"が各国の目指す現代の技術目標なのだ。「SLIM」が無事着陸できた場合、月面着陸としては世界で4番目となるが、それが"ピンポイント着陸"の実績ならば、日本が世界初となる。
軽量な地図と"二段階着陸"可能な5本の脚を持っている
では、狙った場所に100mの精度で降りるために、どういった技術を採用しているのだろうか。
「SLIM」は探査機が撮影した月面の画像と、フライトコンピューターの持つクレーターの情報を突き合わせ、リアルタイムに位置を推定する「画像照合航法」を採用した。リハーサルのない月面着陸ミッションの場合、いったん着陸シーケンスを開始した後は、20~30分ですべてが終わる一発勝負が待ち受けている。月面を目前にした高度50mで撮影した画像から、最も安全な地点を選んで着陸するには、月面の画像をほぼリアルタイムに処理する必要がある。宇宙機としては高速のコンピューターを搭載したSLIMであっても、撮影した画像と画像の地図を突き合わせていたのでは、とても間に合わない。月のクレーター地図を、いかに処理しやすい軽量の情報として持っておくかが重要だ。開発チームは、SLIM本体の開発が始まる前から、このアルゴリズム構築に取り組んできた。
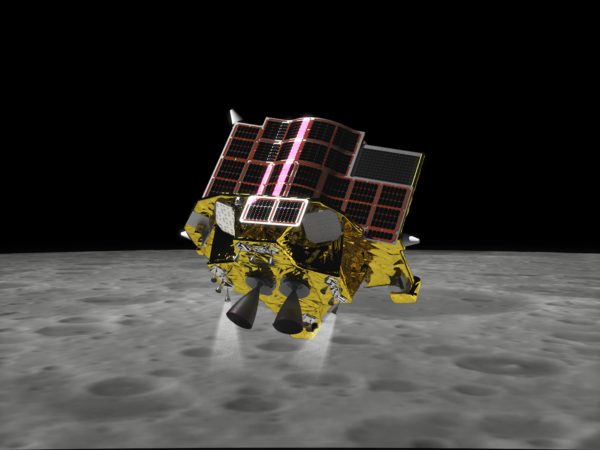
月面で最も安全な地点を探す「SLIM」のイメージ (C)JAXA
また、月面の地形は複雑で、狙った場所が平らで安全とは限らない。そこで「SLIM」本体は、傾斜地でも降りられる"二段階着陸"を採用した。着陸シーケンスの最後は、15度程度の斜面でも安全に降りられるようにエンジンを下にしてホバリングした後、姿勢を前に傾けて前に倒れ込むように着地する。そのため見た目は、厚みのある奴凧か、太ったムササビとでもいうような、探査機としては変わった形状をしており、5本の脚のうち、1本で接地してから前に倒れて着陸するといったユニークな方法をとる。着陸するために「わざと転ぶ」ともいえる方法だが、これなら平坦ではない月面でバランスを取るために、着陸脚の長さを調節するといった複雑な操作も必要なくなる。着陸脚はアルミニウムを3Dプリンタ成形したドーム型になっていて、潰れることで衝撃を吸収することが可能。脚で立つのが難しいなら、最初から立たなければいいのだ。
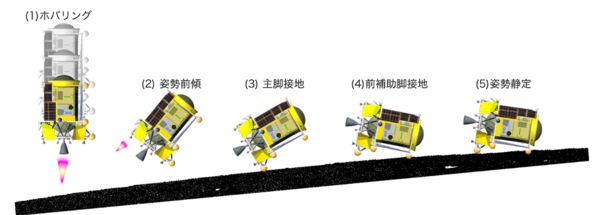
「SLIM」の最終着陸シーケンス (C)JAXA
超小型ローバー、月面変形ロボ「LEV2」
「SLIM」の科学ミッションは、搭載した分光カメラで着陸場所の地質調査を行なうこと。そのため、着陸直前、高度2m付近で2機の小型プローブ(分離型探査機)を放出する。1つはJAXA開発の「LEV1」で、着陸前の「SLIM」から飛び出して、月面でのユニークな着陸を見届け、撮影した画像を地球に送信するという役割を持っている。「LEV2(SORA-Q)」は、タカラトミーが協力して開発した月面変形ロボ。超小型ローバーとして月面を探査する実証を行なう予定だ。

「SLIM」搭載の2機の小型プローブ。左は着陸を撮影する「LEV1」、右はタカラトミー開発の「LEV2」。(C)JAXA
「SLIM」の打ち上げは、2023年8月を目指して調整が続けられている。予定通り8月に地球を出発した場合、3~4ヵ月ほどかけて月の軌道に到達し、さらに1~2ヵ月後に、月面着陸ミッションに挑む。
早ければ2023年末か、2024年初めには「SLIM」が狙いどおりわざと転んでみせる様子と、世界初となる月面着陸の偉業達成を目撃できるかもしれない。楽しみに待ちたい。
本記事はアフィリエイトプログラムによる収益を得ている場合があります








































で240Hz&0.03msという欲張り4Kゲーミングディスプレーが至高の逸品すぎた")























