





auとHAKUTOが鳥取砂丘で実施した月面走行用ローバーのフィールド試験の様子
グーグルがスポンサードし、XPRIZE財団が実施する賞金総額3000万ドル(約30億円)の月面探査レース「Google Lunar XPRIZE」に挑戦する日本唯一のチーム「HAKUTO」とauは、9月27日から月面走行用ローバーでの試験を鳥取県の鳥取砂丘で実施、試験の様子を公開した。

9月27日夜には着陸を予定する月面の北緯45度地点の平均の太陽角度を算定し、鳥取砂丘で角度30度で太陽光に照らされている環境を想定してカメラ試験を実施
鳥取砂丘で9月27日に実施されたのは、砂丘で月面を走行するローバー(プリフライトモデル3)を走行させてのカメラ機能試験および夜間のカメラ機能試験。9月28日にはローバーのフライトモデル(モック)を使用してランダー間との2.4GHz帯(802.11n)での通信試験を行なう予定だったが、当日雨天予想のため中止となった。
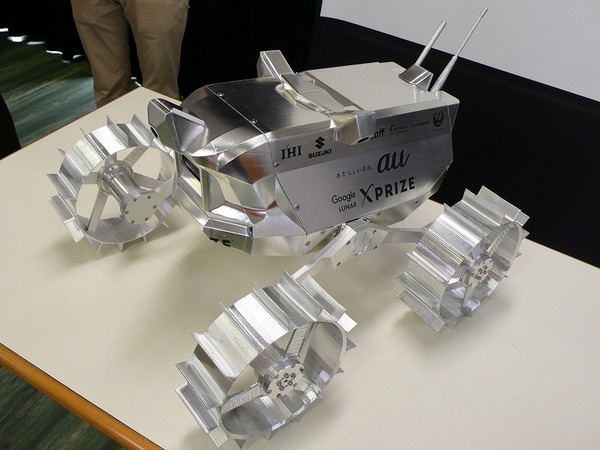
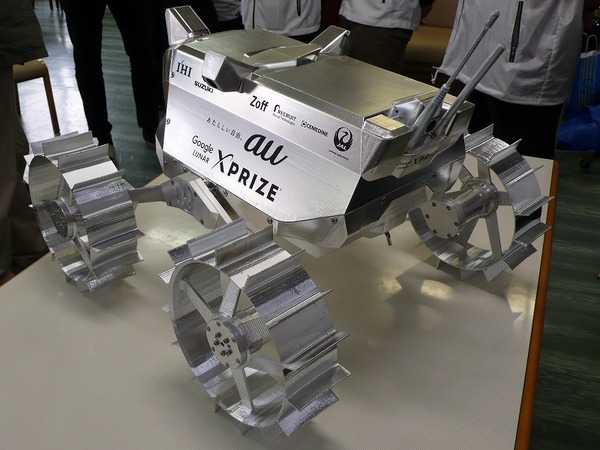
月面走行用ローバーのプリフライトモデル3は、実際に鳥取砂丘で走行してのカメラ試験を実施


ローバーはAndroidタブレットで操作
「Google Lunar XPRIZE」のミッション成功条件は月面に純民間開発のロボット探査機を着陸させて着陸地点から500メートル以上移動後、高解像度の動画や静止画データを地球に送信すること。HAKUTOの通信および動画圧縮系開発に協力するau(KDDI研究所)は、月面と地球間の通信速度は「100kbpsを想定しているが、実効速度は半分か1/3程度と予想される」とコメント。
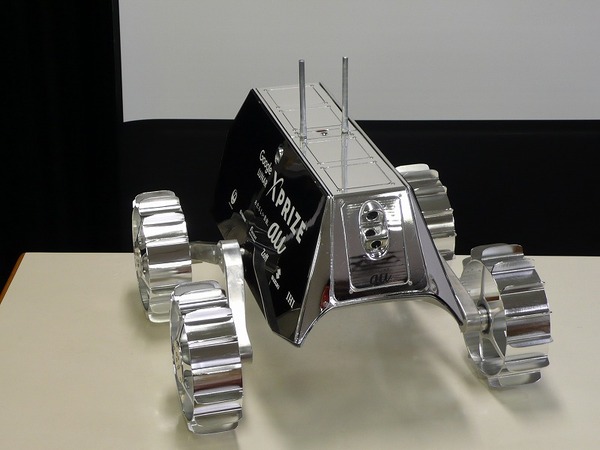

通信試験に利用されるフライトモデル。ソーラー充電のため本体側面は着陸予定地点の角度に合わせて設計
月面の砂の性質は鳥取砂丘などの地球上の砂とは異なり、水分がなく鉄分やチタンなどの成分が多い。電波反射などの特性も異なるとのことだが、28日には雨天中止となった通信系のフィールド試験の代わりに鳥取砂丘の地形を生かして月面を走行するローバーとランダ間のアンテナの見通し距離を計測していた。


9月28日には、ランダーのアンテナ高とローバーのアンテナ高の砂丘の地形越しの見通し距離を計測していた

本記事はアフィリエイトプログラムによる収益を得ている場合があります




























で240Hz&0.03msという欲張り4Kゲーミングディスプレーが至高の逸品すぎた")






























