筆者は以前、METCALF clione(メカフクリオネ)とMETCALF stage(メカフステージ)というウェアラブルアームロボットを制作した。
これらのウェアラブルアームロボットにはフタバのコマンド方式サーボを使っている。サーボモーターというのはサーボ機構において位置、速度などを制御する用途のモーターであり、ロボットなどによく使われている。
コマンド方式サーボは、双方向シリアル通信によるデータの送受信で、目標角度や動作特性の変更といった指示をサーボに与えたり、サーボから内蔵センサーの情報を取得したりできる。
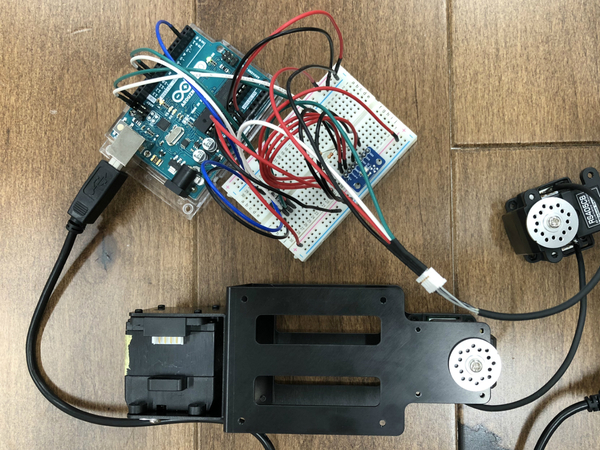
今回は、フタバのコマンド方式サーボ「RS405CB」を、「RSC-U485」というシリアル変換機とArduinoの2種で動かして、最終的に、息を吹きかけるとサーボが動くというコードを書いた。
まずは、RSC-U485をWindows 10で使えるようにする。こちらからドライバーをダウンロードする。Windows 10に対応したものはないが、Windows 7以前のOSに対応したもので使用することができた(私の場合なので保証はしない)。

RSC-U485
Windows 10でドライバーをインストールするには、ドライバー署名を一時的に無効化する必要がある。めんどくさい。こちらのサイトどおりにして署名を一時的に無効化した。
再起動の際にWindowsの回復キーを求められることがある。その場合は、こちらから回復キーを手に入れる。
無効化できたら、RSC-U485をPCに接続した状態でデバイスマネージャーを開きRSC-U485だと思われる対象を右クリックしてドライバーを更新する。これでRSC-U485が使えるようになった。
次に、PCとRSC-U485/RS405CBを接続する。以下の図のようにスイッチハブ「TB-RV71EH 7.4V/4W」を使って接続する。
この連載の記事
- 第305回 新規事業の撤退を“負け”にしない方法
- 第304回 企業人としての事業・プロジェクトの終わらせ方
- 第303回 画像生成AIで自作キャラのジオラマアクスタができたぞ〜〜〜!!!
- 第303回 画像生成AIでオリジナルキャラのLoRAができたぞ〜〜〜!!!
- 第302回 「好きな人にSIMは差せますか?」メンヘラとギャルとアイドルが“通信”についてガチで考えた結果【運営レポ】
- 第302回 私の”2年間目標”教えます
- 第301回 人生を変える「2年間目標」の立て方
- 第300回 最新の「Apple Watch」を健康アイテムとして買った 身体というハードウェアがくたびれてきたので
- 第299回 装着式ロボットを組み立てて、撮る
- 第298回 円形のオーディオスペクトラム作ったんですが、Adobe AEの使い方を学ぶよりChatGPTに聞きながらPythonで実装する方がラクでした(個人的に)
- この連載の一覧へ