
日立初のロボット掃除機は独自技術のかたまりだ。日立以外でこんなものを作ろうというメーカーがいたらお目にかかりたいくらいのこだわりがつまっている。

「minimaru RV-DX1(ミニマル)」は、日立アプライアンスが2003年の技術発表以来、初めて出すロボット掃除機だ。幅25cm×高さ9.2cmとコンパクトサイズで小回りが利き、手狭な日本の家でも手際よく掃除してくれる。家具の脚などを自動でよける機能もある。実売価格10万円前後で昨年11月19日に発売した。
注力製品らしくCMには豪華に嵐フルメンバーを起用。メイキング動画には小さい体で動くミニマルに「おぉ~っ!」と感心する姿が写っている。
開発チームに集まったのは日立で掃除機をつくってきた男たち。最大の目標は小さくてもパワフルにすることだ。コンパクトになったことで掃除機としての性能が落ちたら本末転倒だ。1955年から作り続けてきた掃除機の吸引力には自信がある。“日立の掃除機”ブランドに傷をつけるわけにはいかない。
日立がロボット掃除機の試作機を発表したのは2003年、いまから13年前。さらに歴史をさかのぼると、なんと1983年からロボット掃除機の開発自体は進められてきていた。ミニマル発売までにどんな道のりがあったのか、製造拠点である日立アプライアンス多賀事業所を訪ねて話を聞いた。

■お話を聞かせてくれた開発者のみなさん──
松井康博さん:研究所で走行制御を担当した主任研究員
伊藤則和さん:ミニマルの主任技師
矢吹祐輔さん:技師、本体レイアウトなど担当
山谷遼さん:バンパー周り、車輪関係の詳細設計など担当
加藤尚樹さん:サイドブラシ周り、充電台、取扱説明書など担当
橘川拓也さん:ダストケース周り、ごみプレス機構など担当
「6cm」との戦い
ミニマル最大の特徴は幅25cmという小さなサイズ。実はこれ、13年前に発表した試作機から変わっていない。家具サイズの平均値から「幅25cmならテーブルやイスの脚の間に入り込める確率が高くなる」という結論が出ていたのだ。日本の小さな家には狭い隙間も多く、サイズが大きいと満足な掃除ができない。とくに難しいのが部屋の隅だ。13年前の試作機にはすでに、隅掃除向けの機構が備わっていた。ミニマルの走行制御を担当した松井康博さんは言う。
「当時はロボット掃除機が出始めたばかりのころ。日立としては『掃除機という名がつくからにはしっかり吸うものを』という話で、吸込口がかなりしっかりしたものを作っていましたね。当時からロボット掃除機は丸いものが多かったんですが、円形では部屋の隅が掃除できないということで、部屋の隅を通るときは吸込口がスライドして外に飛び出すというメカメカしい試作品を作っていたんです」


試作品はうまく作れたが、結局発売はされなかった。理由は性能と市場性だ。ロボット掃除機としては作れても、掃除機として満足のいく性能が得られていない。市場もまだまだ小さかった。生産台数が少なくなれば、単価が数十万円ととんでもなく高価になってしまう。基礎研究はできたが性能面と事業面から、開発は2008年から4年間にわたって一時休止してしまう。
プロジェクトが再開したのは2012年。アイロボットが「ルンバ」で拓いたロボット掃除機市場が拡大し、掃除機全体の中でも無視できない存在になってきた頃だ。まだ日立として満足のいく製品が投入できるかわからないが、少なくとも開発を続けなければ競争はできない。ふたたびロボット掃除機との戦いがはじまった。
最大の難所は「6cm」を削ることだった。
13年前の試作機とミニマルで、もっともちがう点は高さだ。当時の高さは13cm、現在より4cm近く高かった。高さを落とさなければベッドやソファの下など低い場所に入りこめないと、開発チームはまず幅を34cmに広げ、代わりに高さを抑えた平べったいモデルを試作した。ほぼルンバに近いサイズだが、1cmほど小さい。さらに部品の配置や機構を工夫して実現した幅は31cm。普通のやり方でサイズを縮めるのは31cmが限界という結論だった。
■試作機サイズ(幅)の推移
幅340×高さ92mm(2012年)
幅310×高さ92mm(2014年)
幅250×高さ92mm(2016年)
しかし求められているのはあくまで幅25cmだ。31cmからの6cmを縮められなければ小さくする意味がない。チームメンバーたちは悩んだ挙句、ひとつの結論を出した。すべての要素部品をミニマルのためにゼロから開発することだ。技師の矢吹祐輔さんは言う。
「小さくするにはそれまでのレイアウトから各構成要素まで全てをゼロから考え直し、他社が扱っていない構造を取り入れなきゃできなかったんです。経験則もまったくないところから全部やらなきゃいけなくなりました」
サスペンションとギアをゼロから作る
6cmとの戦いは、ごみを吸い込む「吸込口」の場所からはじまった。
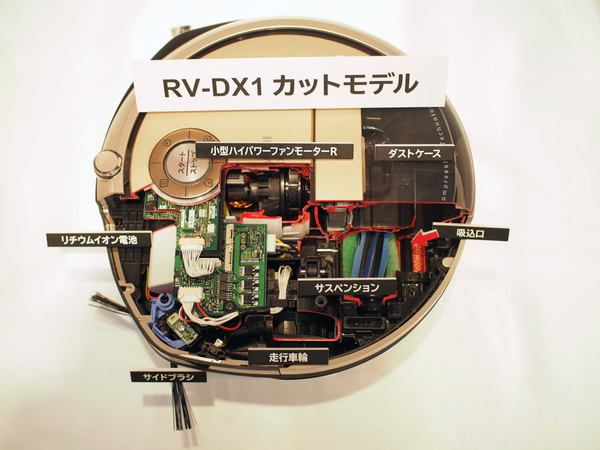
当初、吸込口は本体のどまんなか、車輪のあいだについていた。しかし本体の幅が狭まると車輪の幅があるため、入らなくなる。吸込口を小さくして集じん性能を落とすわけにはいかないため、吸込口のサイズは変えられない。仕方なく吸込口を本体後方にずらすことになり、代わりにどまんなかにもってこられることになったのがファンモーターだった。

ミニマルのファンモーターは同社スティック掃除機「PV-BC500」に搭載していたものをベースに、ロボット掃除機に必要な特性に合わせて新開発した「小型ハイパワーファンモーターR」。効率がよく、少ない電力でも高い集じん性能が期待できた。このモーターは直径66mm以下にサイズを抑えたが、それでも幅25cmの本体では車輪のユニットにぶつかり入らなくなってしまう。困ったチームが考えたのは車輪のユニットを構成するサスペンションとギアを小型化することだった。
通常ロボット掃除機の車輪に使われているシーソー方式のサスペンションでは、軸をおさめる場所と上下のストロークを確保するための広いスペースが必要となってしまう。それを解決するための機構を考えようと、まずはバネが淡々と上下動する単純な仕組みを試作した。しかしそれでは少し横から押されただけで動きがぶれてしまい、うまく動かない。それならとアームを付けて動かす二軸機構のサスペンションも作ってみた。今度はまっすぐ決まったコースをうまく走ってくれたが、いざ家庭の複雑な走行環境を想定して試してみると、やはり厳しい。
悩んだ末に採用したのは、自動車などに使われている「ストラット式サスペンション」。車輪が上下に動く仕組みで、狭いスペースでも搭載できるが、ロボット掃除機に搭載するのは初めてだ。通常ストラット式サスペンションは金属製だが、重量、コストや生産性などの関係から、樹脂製につくりかえる必要が出てきてしまう。素材を変え、構造を簡略化しながらもサスペンションとして使える性能にするまではとても苦労させられたという。

サスペンションと同時に考えられたのが、減速機構に使われるギアの方式だ。通常の平歯車では、横並びでギアを構成している関係で長さを必要とするため、ほかの方式が使えないか研究した。当初有力候補に挙がったのは「不思議遊星歯車」。1つの軸に歯数が異なる2種類の歯車を組み合わせ、内側・外側に配置したもの。計算上はうまくいき、いけるかと思ったが、いざ動かしてみると、ギアの駆動音が異様にうるさい。歯車としての効率も悪かった。
騒音の大きさと効率の悪さはギアの干渉が原因だ。そこで干渉を減らすため試してみたのが通常ポンプなどに使われる「サイクロイドギア」機構だった。車輪内部にギアを構成することで、平歯車ほど長さを必要としない。歯車の滑りが一定で、摩擦によるロスが少なく、減速比の高いギアを小型・軽量化できる。試作してみると、うまくいった。しかし想像以上に手こずったのが量産設計だ。
ストラット式サスペンション同様、ロボット掃除機にサイクロイドギアを使うのも初めてだ。試作はうまくできても、量産向けにしようとするとわずかなサイズのちがいで歯車が回らなくなる。開発者は事業所と歯車の工場の間を何度も往復し、細かな調整をくりかえし、長い時間をかけてギアを完成させたという。
「どこもやったことがない、実績がないというので、新しい機構を作るのが大変でした。試作品は1ヵ月くらいでできるんですが、量産できる精度にもっていくまでには半年くらいかかってしまって。サスペンションもはじめての構造だったので、寿命試験をしたら途中でもたなくなっちゃったりで」(矢吹祐輔さん)
ギアとサスペンションは製品発表会で記者たちに話していた内容だが、話はまだ終わらない。ほかの要素部品も小型化のため独自開発したものばかりだった。
たとえば部屋の隅にあるゴミをかき出す「サイドブラシ」に使われるギア。これもやはりサイズダウンのため平歯車をやめ、小さな「ウォームギア」を2つ組み合わせた2段階減速方式に変更した。同じくゴミをかきとる「回転ブラシ」は2つのタイミングベルトを使った2段減速機構に変更。1段目の減速機構を集じん部の真横に設置して、できるだけ本体のふくらみをもたせないよう工夫した。
回転ブラシのモーターそのものも作りなおした。サイズダウンのためモーターは小型化する必要があったが、ブラシのかきとり力が維持できなければ意味がない。そこでモーターのマグネットを磁界解析を行ない作りなおすことで、ブラシの動作に十分な回転数とトルクを確保できるモーターを開発するに至ったのだという。
基板は上下2層構造、隙間を縫って部品を配置
制御系基板の設計にも苦労させられたそうだ。
基板は本体の高さを抑えるためにどまんなかにあるファンモーターを避けて設置しなければならず、Uの字状に切り欠くような形になってしまう。しかし基板の技術者は「パターンを引く効率が悪い」とUの字状形状をいやがった。それだけではない。通常の制御系回路にくわえ、運転ボタンなどがついた操作パネル用の回路もつけなければならないという課題もあった。
悩んだ末に開発側が提案したのは、「それなら基板を2層入れられるスペースを作ります」というアイデアだ。ようするに「基板を上下2階建てにする」というアイデアで、基板の技術者が話を聞いてドヒャーと驚いた。3D CADで引いた図面上で2層の基板を試しに置き、基板上に“ビル”を建てるように基板用の部品を配置していったという。
「ここには“ビル”(基板用の部品)を建ててもらっていいですよ、代わりに空いている土地についてはこちらでもらいます、という形で、本体内の構造部品、コネクター、強度のいる部分の補強などを入れる場所を取り合いしていきましたね」
吸込口の上についている「ダストケース」にも工夫がある。下から気流とともに入ってくるゴミがこぼれないように「逆止弁」構造をつけることにした。
逆止弁はもともと従来の掃除機で使っていた構造だが、従来と同じ構造では、せっかく高めたファンモーターの能力がゴム弁をもちあげるためにロスしまうことになる。そこで開発したのが回動式のフタだ。ダストケースの着脱に応じてばねの力で自動的に開閉するしくみで、これも今回のためだけの独自開発だ。

ダストケース最大の問題は、小さくてごみを吸える容量が少ないこと。
解決のため、まずはケースに翼のようなリブを入れた。それまでうまく流れず入口付近で滞留していた試験ごみが、ケース内をスムーズに流れるようになり、より多くのごみをためられるようになった。しかしそれでもまだ容量が足りないということで頭をひねり、考えたのがごみを圧縮する「プレス運転」だ。せっかく強いモーターを積んでいるのだからこれを圧縮に使わない手はない。しかし掃除中に常に最大出力でプレス運転していると、運転時間が足りなくなる上に運転音も大きくなってしまう。そこで充電台に戻ったとき、ごみを圧縮するためにプレス運転をさせる「ごみプレス」機能を考案することになったのだという。
ルンバと真逆の道を選んだ走行技術
走行技術も小型ならではの工夫がある。「minimaru AI」だ。
ロボット掃除機市場では家庭内のマップを作成しながら走行する「SLAM」技術を使い、最短距離で掃除を終えようとするロボット掃除機がトレンドだ。しかしミニマルはあえて走行距離を長くとる、昔ながらの「ランダム走行」を選んだ。理由はマッピングではまだごみの取り残しがあると判断したから。小さくても掃除できる範囲を広げることで、集じん性能を上げたかった。
「マッピングをすると1回しか通らない場所ができる。でも、1回だとゴミは取りきれないんですよね。たとえばフローリングは溝にゴミがたまる。溝に並行して動ければいいんですが、うまくいかないときはある。いまの技術だとゴミを取り逃したという判別ができないんです。なら運転中、ランダム走行でできるだけ広い範囲を掃除してもらったほうがいいと判断しています」(松井康博さん)
マッピングの代わりにこだわったのが走行速度だ。走行スピード、方向転換などの動作がすばやく、きびきび動く。たとえば方向転換するときは「減速→回転→加速」という流れがある。一般的なロボット掃除機では次の動きに移るときに待ち時間が生じるが、ミニマルはほぼ待ち時間なしですばやくカーブしていく。
「一般的なロボット掃除機って、本体が動いていない時間が意外とあるんです。実際ヒストグラム分析にかけてみたところ、速度がゼロ近辺の時間と、最高速度で走っている時間が同じような割合で分布していたんです。けっこう止まっているな、こういうムダな時間は極力減らさないといけないなと思ったんですね」(同)
とはいえ、マッピング技術を完全に無視していたわけではない。実際、開発初期はマッピング技術を使った試作機も作っていたそうだが、掃除機としての性能を上げることにこだわった結果、最終的にランダム走行に落ち着いたそうだ。競合アイロボットはずっとランダム走行を続けてきたが、ルンバ「980」シリーズからはカメラを使ったマッピング方式「vSLAM」を採用することになった。ミニマルとルンバでは逆の進化を選んだことになる。
「今後技術開発していく中でマッピングに利点を見出せればそちらにシフトすることも考えますが、いまの回答としてはガンガン動いて吸うと。今後ごみの取り残しを発見する画期的な機能ができれば考えたいですね」(伊藤則和さん)
「嵐のHITACHI」ではなく「技術の日立」

開発者たちが熱意たっぷり語ってくれたインタビューは予定の時間を大幅にオーバーして3時間を超えた。うち大半の時間がギアやサスペンションの構造説明に費やされたのが印象的で、工学系のゼミを見学してきたような気分だった。
ミニマルの特徴は“掃除機をロボット化する”というそもそもの発想にある。アイロボットが地雷除去ロボットを掃除機に転用すると考えたのとは真逆だ。掃除機をロボット化するにはどうするか。日本の狭い家を掃除できなければ意味がない、ならサイズを小さくしよう。要素部品を小さくして掃除能力が落ちてしまったら意味がない、なら掃除に関わる部品のサイズを変えずに入れられるよう内部構造を見なおそう。効率よく掃除するにはマッピング技術を使うのが流行りだが、部屋をきれいにすることを考えるならすばやく動いたほうがいいんじゃないか。
日立はロボット掃除機としては業界最後発だが、いざ開発エピソードを聞いてみると、ロボット掃除機をゼロから発明しなおしてやるというほどの熱意を感じた。ただコンセプトを変えただけの新製品とは次元のちがう情熱がある。あらためて思うと、これが日立だった。嵐のCMで柔らかいイメージに見えているが、一皮むけばゴツゴツした技術のかたまり。技術力と性能に絶大な自信をもった日本人らしい技術者集団、それが日立という会社だった。糖分の足りなくなった頭でぼんやりと、日立駅前に設置された巨大な原子力タービンを見上げながらそう思った。

書いた人──盛田 諒(Ryo Morita)

1983年生まれ、家事が趣味のカジメン。今年パパに進化する予定です。Facebookでおたより募集中。
人気の記事:
「谷川俊太郎さん オタクな素顔」「爆売れ高級トースターで“アップルの呪縛”解けた」「常識破りの成功 映画館に革命を」「小さな胸、折れない心 feastハヤカワ五味」
この連載の記事
-
第79回
家電ASCII
紅茶好きは是非!ティファール、指定温度のお湯つくれる電気ケトル -
第78回
家電ASCII
服のシワ伸ばす機械じかけのクローゼット「LG styler」 -
第77回
家電ASCII
ローソンで人気「糖質制限パン」作れるホームベーカリー -
第72回
家電ASCII
仕事がどれだけイヤかわかる ストレス可視化デバイスSpire -
第71回
ASCII倶楽部
いま買うならこれ! おすすめ家電ランキング2016 -
第70回
家電ASCII
かわいい本格マッサージチェア Bluetoothで音楽も聴ける -
第69回
家電ASCII
「ジュババッ……」おしっこ吸えるクリーナー『switle』初体験 -
第68回
家電ASCII
フィリップス 昼光色と電球色が切り換えられるLED電球 -
第67回
家電ASCII
これ欲しかったー! シャープ、小さくてかっこいい冷蔵庫 -
第66回
ASCII倶楽部
おすすめ最新エアコン4選 進化がすごい2016年秋モデル - この連載の一覧へ
