



















スポーツができるロボットは実現できる?その先にある共働ロボットへの実装目指す
【2月16日、17日開催】NEDO「AI NEXT FORUM 2023」で展示される最新AI技術(9)
本特集では、2月16日・17日に開催されるNEDO「AI NEXT FORUM 2023」でも展示される、社会実装に向けた最前線のAI技術を、全10回にわたって紹介する。第9回は、人と協働作業ができるロボット搭載用AI「サイボーグAI」だ。
NEDO「人と共に進化する次世代人工知能に関する技術開発事業」プロジェクト
「サイボーグAIに関する研究開発」
ロボットと人間との共進化を目指す「サイボーグAI」
ATR脳情報解析研究所 所長の石井信氏は、人と協働する工場や、労働集約的な輸送・配送などの実環境において、適応的に協働作業ができるロボット搭載用AI「サイボーグAI」の基本技術の開発を目指し、運動模倣学習および運動低次元化のアルゴリズム、人間と人工物による共創の研究を行なっている。プロジェクト終了までには、人間並みの運動能力・実時間意思決定能力を評価可能な「サイボーグAI」環境でデモを行うことが目標だ。

京都大学大学院 情報学研究科 教授
株式会社国際電気通信基礎技術研究所(ATR)脳情報解析研究所 所長
石井 信氏
現在のロボットは、実環境ではあまりよく動けない。動くにしても、多くのロボットの動作は遅い。一方、深層学習を活用することで、様々な物体を把持できるロボットの開発も進められている。ただし、数十万回試行したデータが必要となるなど、人間に比べると学習効率ははるかに劣る。米ボストン・ダイナミクスの「Atlas」のようなアクロバティックな動きが可能なロボットもあるにはあるが、こちらは柔軟な学習ができない。
石井氏は、同研究所の森本淳氏、内部英治氏、神谷之康氏、篠本滋氏、ダニエル・カラン氏らと共同で、深層模倣学習と実時間ロボティクス、この2つの技術を統合することによって、人間並みの早い時定数で動き、かつ学習能力を持つロボットを開発することを目指している。「多種少量生産の工場現場や、個別配送などの現場で使えるロボットを作りたい」という。
ロボットと制御アルゴリズムを開発中
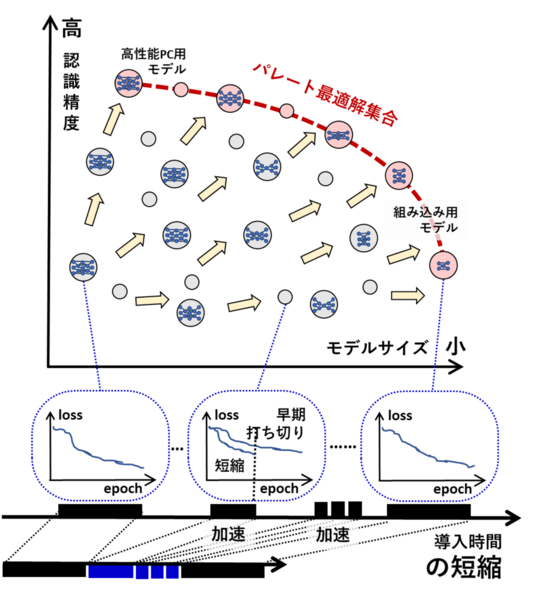
プロジェクトでは現在、森本氏らにより、実際に動かすためのロボットプラットフォームと制御方法を開発中だ。プラットフォームとして用いるロボットは電動で、現在は「Phase-1ロボット」と呼ばれているが、この名称は進化途中であることを意味している。アルゴリズムは、人間の技能を転移学習させ、階層ベイズネットワークによる予測制御を用いる方法を検討している。そのための数理研究も行っている。
これらを、まるでゲームパークのようなスポーツ施設を模擬した「サイボーグAI」環境で、テストして評価する計画だ。スポーツはダイナミックな全身運動を伴う複雑なタスクだが、このうちのいくつかができるロボットになる予定だという。

人の動きを転移させるための技術
アルゴリズム開発については、人の動きを模倣し転移させるための研究を行なっている。こちらは内部氏らにより開発が進められており、深層学習器上で効率の良い見まね学習に成功している。たとえば、障害物を回避しながら、その向こう側のオブジェクトにリーチするような作業が、従来の見まね学習よりも効率良く可能になる。
動物の動きや人の動きをいったんシミュレーター上に転移し、さらにそれを実機に転移させるための研究も行っている。たとえば犬の動きをモーションキャプチャーして、4脚ロボット実機を想定したシミュレーターに転移させる。また人がキックボクシングをやっている動きをキャプチャーし、その動きを転移させるアルゴリズム開発を成功させている。

単に「転移」といっても人とロボットのキネマティクス(関節構造や自由度)は異なるので、そのまま転移させることはできない。また単に手先位置だけを合わせると、人間のかたちを活かさない不自然な動きになってしまう。石井氏は「ほどよい自由度の動きを転移させることが重要」と語る。そこで、どういう低自由度表現があり得るのか、その研究も行なっている。
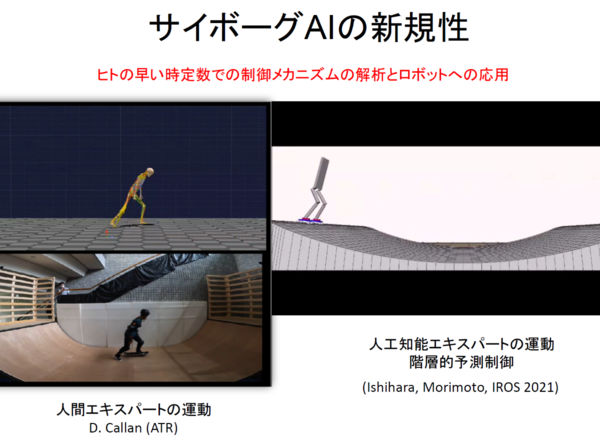
カラン氏と篠本氏らにより、スケートボードをしている動きをモーションキャプチャーして足圧変化を計測したり、脳波計で運動関連電位や筋電を計測したりするなど、複雑な動きをしているときの筋肉の協調や脳の制御の研究も進められている。動きを構成する全身の筋骨格において、ひとまとまりで活動する「シナジー」ベースで転移することが重要だという。プロにスケートボードを使って簡単な動きを行なってもらい、実際にどんなふうに動かしているのか、シミュレーターも活用した研究も行なっている。目指すのは、人と同じ時定数での制御メカニズムの解析とロボットへの応用だ。複雑な動きをさせるには計算量が膨大になりすぎる課題があるが、階層的予測制御を用いることでリアルタイムの予測制御に成功している。また、従来手法よりも効率が良いモデルベース強化学習、深層敵対事例強化学習などの開発も進めている。
実空間で人と協働するためのロボットの実現
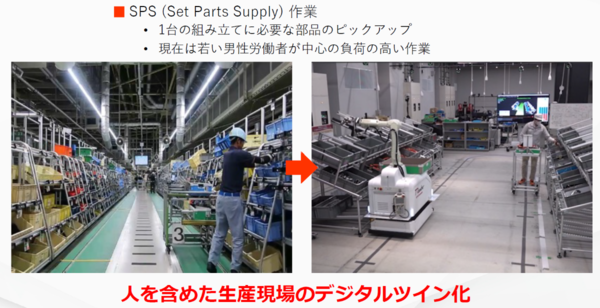
社会実装への展望には、複数の出口があるという。一つ目は多種少量生産の現場で、人と協業するロボットだ。「人と協働するには人間並みの時空間時定数で動いてくれないと困る」と石井氏は語る。「産業用ロボットは高速高精度だけど動けない。だから工場の一部。人と一緒に動けないと話にならない。速度が遅くても困る。同じくらいの速度で動けないと協業はできない」と考えて、実環境・実時間で動けるロボットの開発を目指す。
労働集約性の高い仕事である個別配送や引越し作業などで活動するロボットも想定出口の一つだ。近い将来人手が不足することは確実であり、ロボットの活用が期待される。
運動解析技術は、今後の高齢化社会での運動機能維持法開発への応用もあり得るという。これらのための市場調査も行っている。

スポーツができるヒューマノイドは実現可能か
実際に人がやるようなスポーツの動きをヒューマノイドが行うことはできるのだろうか。目指す目標は、スポーツにおいて必要となるような高い身体性を象徴する高度な動きができるロボットと、そのためのAIの開発である。動物は自由度の高い身体をどのように動かし環境に適応させているのか。石井氏は「多くの知能は運動のためにある。そのメカニズムの多くは未解明」だと語る。
もちろん、単にロボットにスロープを滑らせたりさせるだけでは応用はない。あくまで評価系としてのサイボーグAI環境だ。だが運動知能のメカニズムを解明することができれば、実空間で動いて人と協働するロボットはもちろん、eスポーツのキャラクターの動きにも適用できる可能性がある。
ダイナミックな動きをするロボットを学習制御のアプローチで作りたいというのが石井氏の考えだ。「機は熟した」と語る。「ロボットも開発しているが、特にアルゴリズムと計測実験がだいぶ進んでいる。深層学習ベースとエネルギーベースのやり方で複数の動物・人の動きをシミュレーター・実機に転移するためのアルゴリズムとプラットフォーム開発が進んでいる。人の多自由度データも取得できるようになり蓄積されている」
今、5年プロジェクトの3年目。ここからが実装に向けたアプローチになる。

開催概要
名称:AI NEXT FORUM 2023-ビジネスとAI最新技術が出会う、新たなイノベーションが芽生える-
日時:2023年2月16日(木)、17日(金)10時00分~17時00分
場所:ベルサール御成門タワー「4Fホール」(〒105-0011 東京都港区芝公園1-1-1 住友不動産御成門タワー4F)
アクセス:都営三田線 御成門駅 A3b出口直結、都営大江戸線・浅草線 大門駅 A6出口徒歩6分、JR浜松町駅 北口徒歩10分、東京モノレール 浜松町駅 北口徒歩11分
参加:無料(事前登録制)
内容:AI技術に関する研究成果を実機やポスター展示などにより対面形式で解説(出展数:最大44件)、各種講演やトークセッションを実施(会場参加とオンライン配信のハイブリッド形式)
主催:国立研究開発法人新エネルギー・産業技術総合開発機構
運営委託先:株式会社角川アスキー総合研究所
「ASCII STARTUPウィークリーレビュー」配信のご案内

ASCII STARTUPでは、「ASCII STARTUPウィークリーレビュー」と題したメールマガジンにて、国内最先端のスタートアップ情報、イベントレポート、関連するエコシステム識者などの取材成果を毎週月曜に配信しています。興味がある方は、以下の登録フォームボタンをクリックいただき、メールアドレスの設定をお願いいたします。