





センサー検知対象とした駐車場
ベネ・エルヨン1月21日、駐車場全体または車室単位に対し、リアルタイムに3D-LiDARによるセンシングを行なうシステムを開発したと発表した。

斜め俯瞰から見るセンサー画像
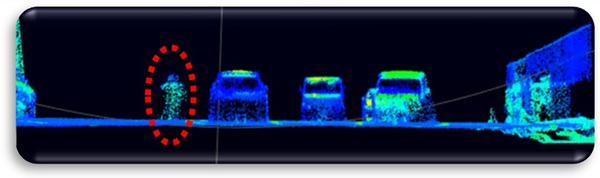
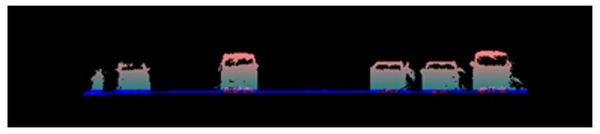
側面から見るセンサー画像
本システムは、3次元認識によって車両等を検知することが特徴。レーザー光を照射して物体を検知する「3D-LiDAR」でセンシングおよび解析を行なうことで、車両を正確に認識できるという。
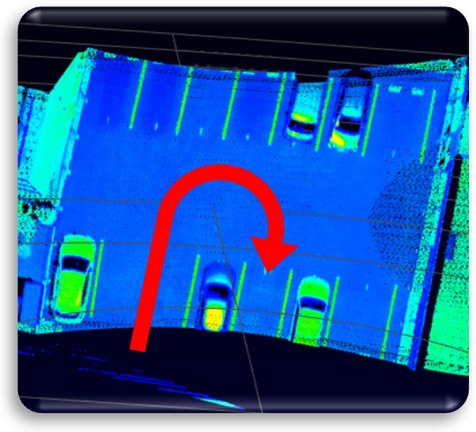
駐車前
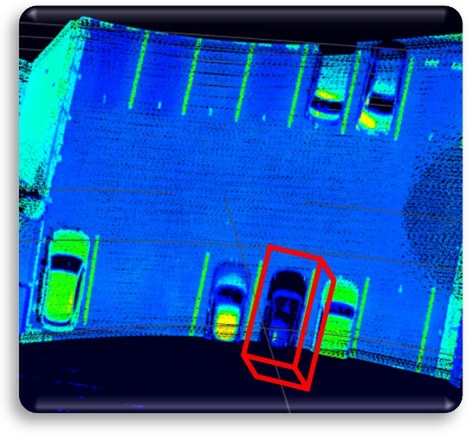
駐車後
本システムでは、3D計測で、設置位置に関わらず地面からの高さをリアルタイムに計測することで車両を判定する。さらに、対象物である車両以外の自転車や人も判別しながら検知することで誤認識を防げるという。
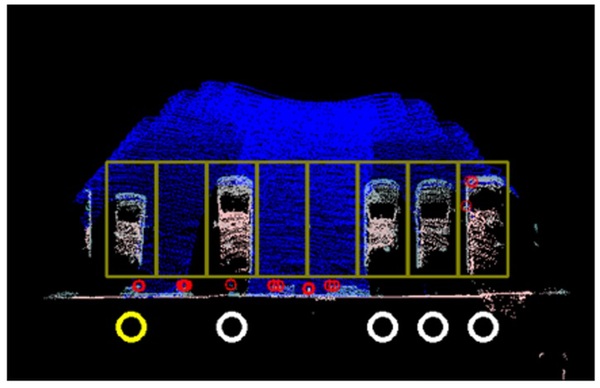
さらに、3次元方向(上面・側面・背面)による複合認識に対応。側面・背面より車両位置や人物等を検知し、上面データと重ねて判定することにより正確に検知。また、車室枠内に正しく駐車されているかの判定も、3次元の車両データから認識判定する。
LiDAR画像_上面

LiDAR画像_側面
LiDAR画像_正面
3次元認識により普通乗用車、トラック(荷台あり)、バンなどを判定し、車両監視、車番認識カメラと同期することで、状況に合わせて料金を変動させる駐車場課金システム(ダイナミックプライシング)も可能なシステムとしている。
従来は、時間貸し駐車場敷地内のセンサーで車を検知したり、車室内にロック板を設置して車両の入出庫を制御したり、車室単位にカメラセンサーポールを設置することで車番認識等を行なったりしていたが、本システムの導入によりそれらは不要になるという。また、車とロック板との接触事故等も回避でき、入出庫時のストレスフリーを実現するという。さらに、システム導入工期の短縮や工事費用の軽減も期待できるとする。








が四角い地球を襲う!5月23日発売『デジボク地球防衛軍2(略)』の魅力をチェック")























