



ハイスペックだけど値段が安いCCP「LAQULITO」も検証!
最新こそ最良! 東芝のロボット掃除機新製品をネチネチ試した
2012年08月31日 12時00分更新

細い机の脚を認識するのは
12個の赤外線センサー&圧力センサー
第1世代のSmarboも数多くのセンサーを内蔵していて驚かされたが、第2世代のSmarboVの赤外線センサーの数を数えて(ビデオで撮影すると赤外線が見える)驚いた。どうやら壁・障害物の検出用に12個搭載しているようだ。通常は斜め前方のみを調べているのだが、SmarboVは真横にも赤外線センサーを持っている。
これまで見てきたムービーでお分かりの通り、定規でも当てているかのように壁際スレスレを真っ直ぐ走行していたが、これは横方向の赤外線センサーで壁との距離を測っているためにできる芸当だ。とにかくSmarboVは、ロボットとして見るとその制御が実に細かく、うまいことやっている印象である。

前から見ると普通のロボット掃除機と同じ、斜め前方を検出しているだけに見える赤外線センサーの窓

なんと真横にも赤外線センサーを持っていた。おそらく壁との距離を測定するためのものだろう

指さしている部分に角度も読み取る圧力センサーを内蔵しているようだ
またバンパーセンサーは、赤外線センサー下のゴム部分にビルトインされているようで、電子式の圧力センサーを持っていると思われる。これは筆者の推測だが、ただ左右、中央に当たったというだけでなく、右30度の方向にぶつかったなどの角度情報も調べている挙動をしていた。
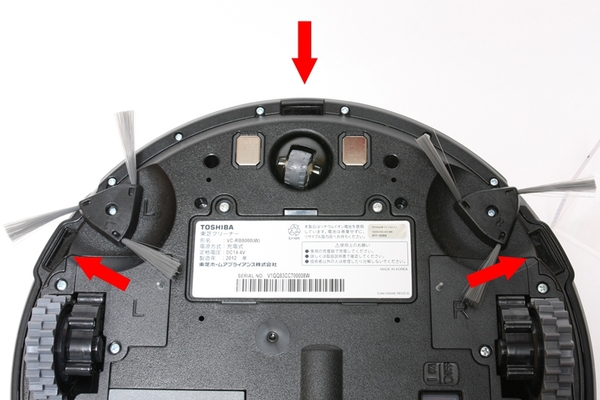
落下防止センサーは前方に3つ搭載。これは一般的な数だ
前述した通り、上部にはCCDカメラがあり、部屋のエッジや照明の位置などの情報を元に、床を7cm四方のマスに区切って自分の位置などを検出している。
それ以外にも向きを検出するジャイロセンサーや、スリップしないように加減速する加速度センサー、駆動輪の回転数(角度)を見て距離を割り出すなど、全部で45個のセンサーを持っているという。
なお以下の表は、筆者が独自に調べたセンサー類となっている。
| SmarboV | |
|---|---|
| ダストビンFULLセンサー | なし |
| 壁センサー | 赤外線×12、パンパー (圧力センサー方式) |
| 階段センサー | 赤外線×3 |
| 巻き込み防止センサー | あり |
| 走行不能センサー | あり |
| 床ゴミセンサー | あり |
| 空間マッピング | あり(天井CCDカメラ) |
| 速度制御 | あり |
| ジャイロセンサー | あり |
筆者はロボット工学が専門だったが、これだけのセンサーを常に監視し、壁づたいに真っ直ぐ走らせる技術の高さにかなり驚きだ。察するにすべてのセンサーから割り込みを上げて、それに対してイベントドリブンなプログラムを書いているような感じがする。
CPUは2個搭載され、1つは画像処理を専門に行ない、もう1つはその他すべてを統括する。この2つの連携も絶妙で、おそらくX,Yの2次配列変数を使い、画像処理のCPUから部屋のマッピング情報と自分の位置情報を取得しているようだ。うわっ、書いてるうちにマジでソースコードが見たくなってきた(笑)。
難しくてわかんないって読者は、とにかくSmarboVは掃除機以前にロボットとして精巧に作られ超絶妙に制御されていると思ってほしい。
第1世代とSmarboVはドコが違う?
型落ちは本当に買いなのか!?
2011年10月1日に発売された第1世代Smarboだか、1年もしない9月1日から第2世代のSmarboVが発売される。そのため読者によっては、「安くなった第1世代機が買い時!」と考えるかもしれないので、その違いをざっくりまとめてみた。
| 項目 | Smarbo | SmarboV |
| 総センサー数 | 38個 | 45個 |
| バンパーセンサー | スイッチ式(フォトインタラプタ) | 圧力センサー式 |
| 空間マッピングの分解能 | 20cm四方 | 7cm四方 |
| 掃除モード | 自動・スポット・念入り・(壁際※) | 自動・節電・スポット |
| 走行パターン | 矩形ジグザク(念入りモードで縦横に1回) | 矩形ジグザク(自動モードで縦横に2回) |
| 8畳間掃除時間(筆者実測値) | 13分(自動モード) | 41分(自動モード) |
| 運転音(筆者実測値) | ターボ時:60dB | 標準時:48dB |
| 標準時:42dB | 弱時:45dB | |
| ブラシ幅 | 狭い | 幅広 |
| フィルター | 標準(前段メッシュなし) | 準HEPA(前段メッシュあり) |
| ブラシ | ゴム+起毛ブラシ | 起毛ブラシ軟+硬 |
| バッテリー | ニッケル水素(2000mAh) | リチウムイオン(2200mAh) |
| バッテリー寿命 | およそ1年 | およそ1年半 |
| バッテリー切れ自動再開 | あり(充電器から5m以内) | あり(距離に制限なし) |
| ダストビン掃除機吸出し口 | あり | なし |
| 本体高さ | 93mm | 80mm |
※壁際:バンパーセンサーを壁にぶつけながら壁際ギリギリを掃除するモード。通常は赤外線センサーにより壁にはぶつからないように走行する
大きく違うのは、第1世代では掃除の早さを重視して、自動モードがSmarboVの節電モード相当の矩形ジグザク走行1回としているところだろう。SmarboVでは従来機の念入りモードが自動モードになっている。おそらくこの仕様変更にはユーザーからの声も反映されており、自分で掃除するわけじゃないので早さよりキレイさを求める声が多かったと思われる。
このあたりは、すでにロボット掃除機を発売していた東芝の強みがある。ちなみに正確に言うと東芝は2002年にもロボット掃除機を発売していたので、SmarboVは第3世代になる。
また吸い込み口の幅も掃除機の性能を大きく左右してくるだろう。


従来機(左)は駆動輪の内側に収まる幅だったが、SmarboVは幅広になり黄色の外枠も細くなっている
運転音は小さくなり、本体の高さも2cm以上低くなったので掃除できる範囲も増えた。搭載するセンサーも多くなり、空間マッピングの分解能力も上がったため、より正確なマッピングが可能になっている。ひとつだけ残念なのは、従来のSmarboはダストビンの上に穴があり、そこから掃除機を使ってゴミを吸い出すことができたが、SmarboVではできなくなっている。だが、どう見てもSmarboVの機能向上の方が便利なので、そこまで残念というわけでもない。


従来機は、ダストビンの上にあるカバーを開いて、掃除機でゴミを吸い取ることができた。SmarboVでは、幅広の吸い込み口とフィルターの関係で付けられなかったようだ
確かに従来機の価格は下がるだろうが、ここはPCと一緒で新型のSmarboVを買った方が将来的にはトクかと思われる。
SmarboVのその他の魅力を写真で紹介
これまでに紹介できなかった機能などは、写真とともに簡単に説明していこう。

リモコンですべての操作が可能。加えてラジコンのように手動でSmarboを動かす手動運転もできる

操作パネルは非常にシンプルでボタンは3つだけ。なおタイマー/デイリータイマーの予約はリモコンで行なう

バッテリーはリチウムイオンで容量は2200mAh。本体の重量軽減とバッテリー寿命の延長にもなっている
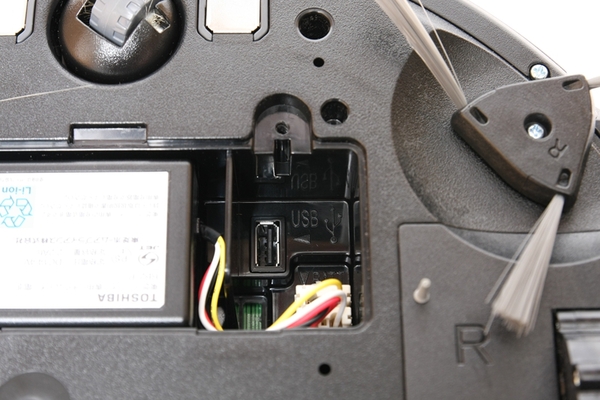
マニュアルでは一切触れられていないが、USBコネクターもついている。おそらくファームウェアの書き換え時などで使うのだろう。将来性もありそうだ

モップもついているのでフローリングの乾拭きもできる

充電台はACアダプター式ではなく、直接コンセントに差し込むタイプなので配線がすっきり
この連載の記事
-
第2回
トピックス
メイドロボと安価、両極端なロボット掃除機をじっくりテスト -
第1回
トピックス
ロボット掃除機はハウスメイドの夢を見るか? 徹底的に検証した -
トピックス
メイドロボも間近!? ロボット掃除機の実力を見よ! - この連載の一覧へ








が四角い地球を襲う!5月23日発売『デジボク地球防衛軍2(略)』の魅力をチェック")























