



次世代のロボットやAI開発を担う若い技術者たちが自律ロボット技術を競う!
若きエンジニアたちの挑戦「全日本マイクロマウス大会2017」レポート
2017年12月02日 10時00分更新


世界で最も歴史のあるロボコン「マイクロマウス大会」をご存じでしょうか。自作の自律制御ロボットで迷路を走破し、ゴールへ到達するまでの時間を競うロボット競技なのですが、コレがかなり熱いのです!
11月19日に芝浦工業大学芝浦キャンパスで開催された、「全日本マイクロマウス大会2017」決勝戦を観て、ラジコンやミニ四駆が好きな自分はひと目でヤラれちゃいました。

次世代のロボットやAI開発を担う若い技術者たちが、自ら開発したマイクロマウスを持ち寄りその性能を競うこの「全日本マイクロマウス大会2017」。アジアをはじめ北米やヨーロッパなどからの参加者も多く、全日本大会でありながらもこれが事実上の世界大会とも呼べるほど。17日の試走会、18日の予選、そして19日の決勝という3日間で開催された大会がいちばん盛り上がりをみせるのは、やはり決勝日。

海外からチームで参加する若い技術者も多く見られた
ミニ四駆やラジコンよりも熱いベストラップ争い!
「ロボトレース競技」
まずは、決勝日の10時ごろにいちばんの盛り上がりをみせていた「ロボトレース競技」からご紹介いたします。これはコースにひかれた白線上を、自律走行が可能なロボトレーサー(全長25×全幅25×全高20cm)でトレースし、そのベストラップを競う競技。

車体に取り付けられたLEDセンサーで、白線やコーナーに設置されたマーカーを読みコースを解析して自律走行する
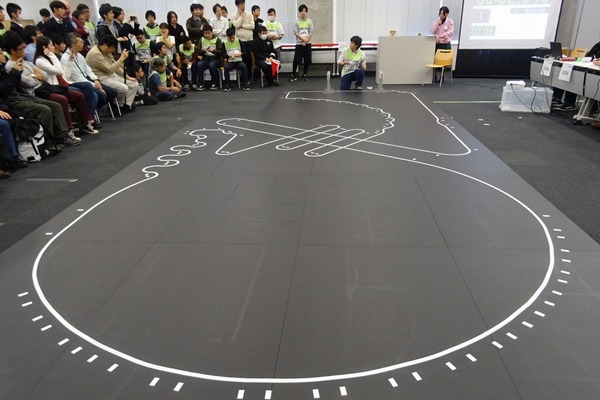
幅1.9cmの白いラインがひかれたロボトレース競技のコース。ライン上から車体が外れたらリタイアとなる
競技は3分の持ち時間で3回の走行が可能。基本的に1回目の走行はゆっくり走り、各種センサーで白線やコーナーマーカーを読みとることでコースレイアウトを記録し、搭載されたCPUで解析する。そのデーターをもとに2回目から本格的なアタックを開始!
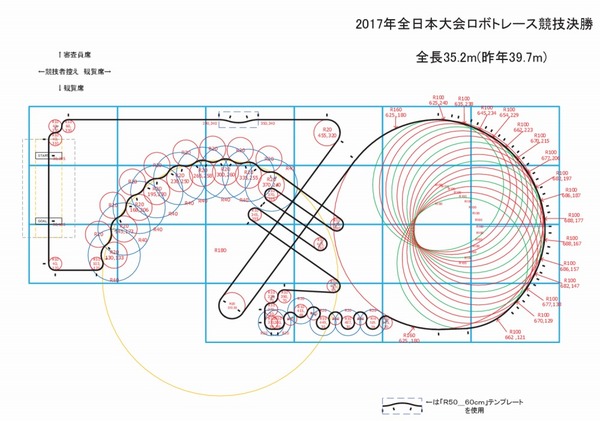
右の大きなコーナーは複数の曲率で構成されており、補正プログラムによって人が目で見たのと同じようにひとつの曲率で走る車も(そのほうがタイムが出る)
自律制御とは思えないコーナー前での自動減速などは、まるでエキスパートが操作するラジコンのよう! そして決勝ラウンドは、最後の選手の最終アタックでこの日のいちばん時計が出るというドラマチックな展開に!
【ロボトレース2017 優勝走行】
数台が同時に走るミニ四駆などとは異なり、パッと見の派手さはないのですが、ストイックにタイムを削る様はレース好きにはたまらない!
この日のいちばん時計である14秒301を叩き出して優勝したのは、遠藤隆記選手のマシン「RS-100」。コーナーに合わせて4つのタイヤを駆動する4機のブラシレスモーターの回転率を変えることで、ワイドトレッドにもかかわらず、きついコーナーでも吸い付くように曲がる姿が印象的でした。

マイクロマウス大会初参加で優勝した遠藤隆記選手。マシンは駆動箇所のクリアランスを入念に調整して仕上げたとのこと

トレーサーには珍しいラジコンカーのようなステアリング機構をもつ
こちらは惜しくも0.076秒落ちの14秒377で、準優勝に甘んじた平井雅尊選手のマシン「Cartis04.5」。上部にドローンのようなユニットが! これは4枚のプロペラにより車体を路面に押し付けグリップ力を上げるためのユニット。タイムはほぼ同じなのに、2台のマシンの姿がまったく違うのがおもしろいです。

こちらもコーナーによって4枚のプロペラの回転率を変えて、4輪のグリップを調整する仕組みとのこと

昨年の覇者で数回の優勝経験のあるベテランの平井雅尊選手。「競い合いつつも、海外などの参加者達と国際的な技術交流ができるのも、この競技の魅力のひとつです」と語る








が四角い地球を襲う!5月23日発売『デジボク地球防衛軍2(略)』の魅力をチェック")





















